Om du ville tillryggalägga en lång sträcka och hade världens bästa sprinters till ditt förfogande, skulle du låta dem springa mot varandra eller arbeta tillsammans i en stafett? Det är i huvudsak det som är problemet Elliott Rouse, en biomedicinsk ingenjör och chef för Neurobionics Lab vid University of Michigan, Ann Arbor, har brottats med i de bästa åren.
Innehåll
- Främja samarbete
- Här kommer det bioniska benet
Rouse, ingenjör, är en av många som arbetar med att utveckla ett kontrollsystem för bioniska ben, konstgjorda lemmar som använder olika signaler från bäraren för att agera och röra sig som biologiska lemmar.
Öppen källkod bioniska ben syftar till att snabbt utveckla proteser
"Förmodligen den största utmaningen med att skapa ett robotben är kontrollenheten som är inblandad och talar om för dem vad de ska göra," sa Rouse till Digital Trends. "Varje gång bäraren tar ett steg måste ett steg initieras. Och när de byter måste benet veta att deras aktivitet har förändrats och rör sig för att anpassa sig till den annorlunda aktiviteten. Om det gör ett misstag kan personen bli väldigt, väldigt skadad - kanske falla nerför några trappor, till exempel. Det finns begåvade människor runt om i världen som studerar dessa kontrollutmaningar. De investerar år av sin tid och hundratusentals dollar på att bygga ett robotben. Det är så det har varit sedan det här området började."
Relaterad
- Climeworks vill rengöra atmosfären med en flotta av byggnadsstora dammsugare
Främja samarbete
Bara, enligt Rouse, är det ett trasigt system. Det är förståeligt att konkurrerande högteknologiska företag viker sig i hemlighet när de utvecklar Next Big Sak de hoppas kommer att sälja en gajillion enheter och lägga till ytterligare några hundra miljarder dollar eller mer till deras marknad keps. Men det är mindre förståeligt när forskningsinstitut slösar bort briljanta sinnen genom att få dem att lösa samma problem som andra universitet också löser. Heck, även en gång svurna fiender Apple och Google arbeta tillsammans när insatserna är tillräckligt höga.
Rekommenderade videor
"Det akademiska systemet är inte superbra på att främja kollaborativ forskning," medgav Rouse. "Som professor har jag ett jobb att göra där jag mäts på vissa saker som federal finansiering, stipendier som publiceras och studenter som jag mentor. Om man tittar på hur det akademiska systemet fastställer riktmärket för fakulteten i forskningslaboratorier, är samarbete [faktiskt typ] avbetonad."
När det gäller styrsystem för bioniska lemmar är problemet att, för att ens kunna starta utveckla styrsystem, individuella forskningslabb runt om i världen måste först bygga det underliggande hårdvara. För att återgå till den tidigare analogin, det är värre än att till exempel Apple och Samsung utvecklar konkurrerande smartphones i topphemlighet; det skulle vara mer som att Apple och Samsung måste bygga sina egna datoroperativsystem från grunden innan de börjar designa sin nästa generation smartphone.
Det är här Rouses projekt, den Ben med öppen källkod, spelar in. Som forskarna bakom förklarar på en dedikerad webbsida: "Det övergripande syftet med detta projekt är att förena en fragmenterad fältforskning inom protetisk hårdvarudesign, proteskontroll och amputerade biomekanik görs för närvarande i silos. Varje forskare utvecklar sitt eget robotbensystem för att testa sina kontrollstrategier eller biomekaniska hypoteser. Detta kan bli framgångsrikt på kort sikt eftersom varje forskare producerar publikationer och sprider kunskap. Men på lång sikt hindrar denna fragmenterade forskningsmetod resultat från att påverka livet för individer med funktionsnedsättningar — som kulminerar i ett övergripande misslyckande inom området att verkligen ha den inverkan som motiverade det."
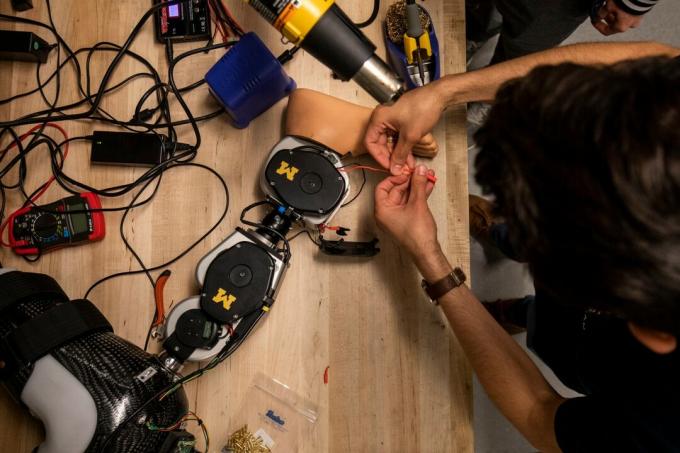
Här kommer det bioniska benet
Open-Source-benet är, som namnet antyder, ett bioniskt ben med öppen källkod som kan bli det allestädes närvarande hårdvarusystemet för att underlätta tillväxt inom området för proteskontroll. Designen är enkel (vilket betyder lätt att montera), bärbar (lätt och drivs av batterier ombord), ekonomisk (det kostar mellan $10 000 och $25 000, jämfört med $100 000 plus kommersiellt tillgängliga, drivna proteser), skalbara och anpassningsbar. Detaljerade instruktioner finns tillgängliga online att följa, och Rouse och hans kollegor kommer till och med att bygga dem och skicka ut dem till forskare när det inte är möjligt att skapa en själva.

I processen strävar projektet efter att uppnå tre mål. Den första av dessa är att identifiera en elektromekanisk design som kan användas för låg kostnad, högpresterande, öppen källkod för robotknä- och ankelsystem. För det andra att förstå hur separata proteskontrollstrategier kan kombineras för att gynna amputerades gång. Slutligen vill Open-Source Leg-projektet validera sitt föreslagna open-source-system som ett verktyg för forskning om proteskontroll. Om dessa forskningsmål kan uppnås, kan det visa sig vara den spelomvandlare som dess skapare hoppas att det kommer att bli.
"Under min livstid kommer vi att se bioniska lemmar som kan använda neural information, antingen på den kortikala eller perifera nervnivån, för att berätta för oss grova rörelser,” sa Rouse. "Det ger oss kontroll utan behov av sensorer ombord." Denna revolution, sade han, pågår redan. Även om finkorniga rörelser kan ta längre tid än så här, är det inte nödvändigtvis en sci-fi-dröm som är många liv ifrån att hända.
Och om folk kan komma på hur man samarbetar kan det vara här mycket snabbare.
Redaktörens rekommendationer
- Hur 3D-utskrift har förändrat världen av proteser för alltid



