En gang litt mer enn en Hollywood-aktig rørdrøm, ble selvkjørende biler en realitet på 2010-tallet, hovedsakelig takket være forskningen utført av teknologiselskaper som Google. Selv om de ikke har slått seg sammen til mainstream ennå, og du ikke kan kjøpe en i skrivende stund, logger selvkjørende prototyper millioner av miles på landets veier årlig.
Innhold
- Den førerløse drømmen begynner
- John McCarthys robo-sjåfør
- Ingen hender på tvers av Amerika
- Grand Challenge er for utfordrende
- Parkering blir smartere
- Google søker etter svar
- De store bilprodusentene stuper inn
- Det første dødsfallet i autonome biler
- A.I. kommer til selvkjørende biler
- Hva blir det neste?
- Autonominivåer forklart
Å komprimere historien til selvkjørende biler til færre enn 10 milepæler er ikke lett, men vi har gjort vårt beste.
Anbefalte videoer
Den førerløse drømmen begynner
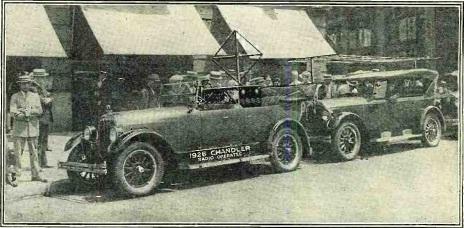
Det tok ikke lang tid etter fødselen av bilen før oppfinnerne begynte å tenke på autonome kjøretøy. I 1925, oppfinner Francis Houdina demonstrert en radiostyrt bil, som han kjørte gjennom gatene på Manhattan uten noen ved rattet. I følge en perioderapport fra New York Times var det radiostyrte kjøretøyet i stand til å starte motoren, skifte gir og gi hornet «som om en fantomhånd satt ved rattet».
Som en morsom side, hørtes Houdinas navn tilstrekkelig ut som navnet til den berømte rømningskunstneren og illusjonisten Harry Houdini til at mange mennesker trodde dette var Houdinis siste triks. Houdini besøkte Houdina Company og havnet i en fysisk krangel, der han knuste en elektrisk lysekrone.
John McCarthys robo-sjåfør
I 1969, John McCarthy - som er feiret som en av grunnleggerne av kunstig intelligens - beskrev noe som ligner på det moderne autonome kjøretøyet i et essay med tittelen "Datastyrte biler." McCarthy refererte til en "automatisk sjåfør" som er i stand til å navigere på offentlig vei via en "TV-kamerainngang som bruker den samme visuelle inngangen som er tilgjengelig for den menneskelige sjåføren."
Han skrev at brukere skulle kunne angi en destinasjon ved hjelp av et tastatur, som deretter ville be bilen om å umiddelbart kjøre dem dit. Ytterligere kommandoer vil tillate brukere å endre destinasjon, stoppe på et toalett eller en restaurant, senke farten eller øke hastigheten i nødstilfeller. Det ble ikke bygget noe slikt kjøretøy, men McCarthys essay la oppdraget for andre forskere å jobbe mot.
Ingen hender på tvers av Amerika
Neural nettverksbasert autonom kjøring
På begynnelsen av 1990-tallet forsker Carnegie Mellon Dean Pomerleau skrev en Ph.D. oppgave som beskriver hvordan nevrale nettverk kan tillate et selvkjørende kjøretøy å ta inn råbilder fra veien og sende ut styrekontroller i sanntid. Pomerleau var ikke den eneste forskeren som jobbet med selvkjørende biler, men bruken hans av nevrale nett viste seg å være god. mer effektive enn alternative forsøk på å manuelt dele inn bilder i "vei"- og "ikke-vei"-kategorier.
I 1995 tok Pomerleau og medforsker Todd Jochem med seg Navlab selvkjørende bilsystem på veien. Deres selvstyrte minivan med bare bein (de måtte kontrollere hastighet og bremsing) reiste 2797 miles kyst-til-kyst fra Pittsburgh til San Diego på en reise paret kalte «No Hands Across America».
Grand Challenge er for utfordrende
DARPA kunngjorde sin første Grand Challenge i 2002. Den tilbød forskere fra toppforskningsinstitusjoner en pris på 1 million dollar hvis de kunne bygge et autonomt kjøretøy som kunne navigere en 142-mils bane gjennom Mojave-ørkenen.
Utfordringen ble holdt i 2004. Ingen av de 15 deltakerne klarte å gjennomføre kurset. Den "vinnende" oppføringen dekket mindre enn 8 miles på flere timer før det tok fyr. Det var et ødeleggende slag for målet om å bygge ekte selvkjørende biler; etter at nyhetene om brannen skapte overskrifter, antok mange at full autonomi var umulig å nå.
Parkering blir smartere
Audi Piloted Parking (Audis selvparkerende bil)
Mens autonome kjøretøy fortsatt så ut som science fiction på 2000-tallet, begynte selvparkeringssystemer å dukke opp enten som standard eller ekstrautstyr (og for det meste på luksusbiler). De demonstrerte at sensorer var i nærheten av å kunne håndtere relativt utfordrende forhold i den virkelige verden, som parallell parkering på trange steder.
Toyotas hybrid Prius tilbød automatisk parallellparkeringsassistanse i 2003, mens Lexus snart la til et lignende system til LS, flaggskipets sedan. Ford lanserte Active Park Assist i 2009, og BMW fulgte etter et år senere.
Google søker etter svar

Google lanserte i hemmelighet sitt Self-Driving Car Project i 2009. Kjent som Waymo i 2020, ble det opprinnelig ledet av Sebastian Thrun, den tidligere direktøren for Stanford Artificial Intelligence Laboratory og medoppfinneren av Google Street View. Det tok noen år for selskapet å kunngjøre at prototypene deres samlet hadde kjørt 300 000 miles under datakontroll uten en eneste ulykke, en imponerende bragd som overtok mange.
I 2014 avslørte den en autonom prototype uten ratt, gasspedal eller bremsepedal; den var 100 % autonom. Waymo er mye hyllet som den ubestridte lederen innen selvkjørende teknologi.
De store bilprodusentene stuper inn

Innen 2013 ble bilselskaper inkludert General Motors, Ford, Mercedes-Benz og BMW jobbet med sine egne selvkjørende teknologier. Ekte autonomi viste seg å være vanskeligere å oppnå enn mange antok, både fra et teknisk og et juridisk synspunkt, og teknologien tilgjengelig for forbrukere på 2010-tallet var i beste fall delvis automatisert.
Det første dødsfallet i autonome biler

Påstander om at selvkjørende teknologi er tryggere enn menneskelige sjåfører ble stilt spørsmål ved en av Ubers Volvo XC90-baserte prototyper truffet og drept 49 år gamle Elaine Herzberg da hun krysset en gate i Arizona. Selv om hun gikk jaywalking, ble krasjet ansett som helt unngåelig. Politifolk konkluderte med at Ubers sikkerhetssjåfør (som skal ta over i nødstilfelle) så på Hulu inntil et halvt sekund før sammenstøtet.
A.I. kommer til selvkjørende biler

På CES 2018, avduket Nvidia en ny selvkjørende bilbrikke, kalt Xavier, som inkluderer kunstig intelligens. Selskapet annonserte da at det var det samarbeid med Volkswagen å utvikle A.I. for fremtidige selvkjørende biler. Selv om det ikke er det første forsøket på å gi autonome biler A.I. (Toyota forsket allerede på konseptet med MIT og Stanford), er Volkswagen-Nvidia-samarbeidet det første som kobler sammen A.I. til produksjonsklar maskinvare. Det åpner muligheten for at selvkjørende biler kan prestere bedre, samt for nye bekvemmelighetsfunksjoner som digitale assistenter.
Hva blir det neste?
I 2020 har de fleste bilprodusenter avkjølt sine selvkjørende bilambisjoner og tatt en langt mer realistisk tilnærming til å utvikle teknologien. Det er ikke en eneste autonom bil som medlemmer av allmennheten kan kjøpe, men noen firmaer tror de er nær ved å knekke koden. Milliarder av dollar og et misunnelsesverdig monopol står på spill.
Tesla selger en opsjonspakke kalt Full Self-Driving, men bilene er ikke autonome på noen måte; den tyske regjeringen ba den om å slutte å bruke dette begrepet. Volkswagen er utvikle teknologien internt, og den lovet å distribuere autonome varebiler i retrostil under verdensmesterskapet i 2022. Og den tyske leverandøren Bosch slo seg sammen med Mercedes-Benz morselskap Daimler for å sette autonome S-Klasse-baserte prototyper på gatene i San Jose. Andre partnerskap, prosjekter, suksesser og fiaskoer vil utvilsomt dukke opp tidlig på 2020-tallet.
Autonominivåer forklart
Selv om begrepene "selvkjørende" og "autonom" blir kastet rundt mye, har ikke alle kjøretøy de samme egenskapene. De SAE autonomi skala brukes til å bestemme ulike nivåer av autonom kapasitet. Her er et sammenbrudd.
Nivå 0: Ingen automatisering. Føreren kontrollerer styring og hastighet (både akselerasjon og retardasjon) til enhver tid, uten hjelp i det hele tatt. Dette inkluderer systemer som kun gir advarsler til sjåføren uten å gjøre noe.
Nivå 1: Begrenset førerassistanse. Dette inkluderer systemer som kan kontrollere styring og akselerasjon/retardasjon under spesifikke omstendigheter, men ikke begge deler samtidig.
Nivå 2: Førerassistentsystemer som kontrollerer både styring og akselerasjon/retardasjon. Disse systemene flytter noe av arbeidsbelastningen bort fra den menneskelige sjåføren, men krever likevel at personen er oppmerksom til enhver tid.
Nivå 3: Kjøretøy som kan kjøre seg selv i visse situasjoner, for eksempel i tett trafikk på delte motorveier. Menneskelig inngripen er ikke nødvendig når autonom modus er aktivert, men sjåføren må være klar til å ta over når kjøretøyet møter en situasjon som overskrider grensene.
Nivå 4: Kjøretøy som kan kjøre selv mesteparten av tiden, men som kan trenge en menneskelig sjåfør for å ta over i visse situasjoner.
Nivå 5: Fullstendig autonom. Nivå 5 kjøretøy kan kjøre seg selv til enhver tid, under alle omstendigheter. De har ikke behov for manuelle kontroller.
Redaktørenes anbefalinger
- Volkswagen lanserer sitt eget selvkjørende biltestprogram i USA.
- Autonome biler forvirret av San Franciscos tåke
- Lyser kontrollampen din på motoren din? Her er 10 mulige grunner
- De beste iPhone-bilfestene i 2023: topp 10 beste du kan kjøpe
- Teslas bruktbilmarked er ikke lenger like lukrativt, viser data



