Hvis du ønsket å tilbakelegge en stor distanse og hadde verdens beste sprintere til rådighet, ville du fått dem til å løpe mot hverandre eller jobbe sammen i en stafett? Det er i hovedsak problemet Elliott Rouse, en biomedisinsk ingeniør og direktør for Neurobionics Lab ved University of Michigan, Ann Arbor, har slitt med i de beste årene.
Innhold
- Fremme samarbeid
- Her kommer det bioniske beinet
Rouse, en ingeniør, er en av mange som jobber med å utvikle et kontrollsystem for bioniske ben, kunstige lemmer som bruker ulike signaler fra brukeren til å handle og bevege seg som biologiske lemmer.
Åpen kildekode bioniske ben har som mål å raskt fremme proteser
"Sannsynligvis den største utfordringen med å lage et robotben er kontrolleren som er involvert, og forteller dem hva de skal gjøre," sa Rouse til Digital Trends. "Hver gang brukeren tar et skritt, må et skritt igangsettes. Og når de bytter, må beinet vite at aktiviteten deres har endret seg og bevege seg for å imøtekomme den forskjellige aktiviteten. Hvis det gjør en feil, kan personen bli veldig, veldig skadet - kanskje falle ned noen trapper, for eksempel. Det er dyktige mennesker rundt om i verden som studerer disse kontrollutfordringene. De investerer år av sin tid og hundretusenvis av dollar i å bygge et robotben. Det er slik ting har vært siden dette feltet startet.»
I slekt
- Climeworks ønsker å rense atmosfæren med en flåte av støvsugere i bygningsstørrelse
Fremme samarbeid
Bare, ifølge Rouse, er det et ødelagt system. Det er forståelig at konkurrerende høyteknologiske firmaer hunker ned i hemmelighold når de utvikler Next Big Ting de håper vil selge en gajillion enheter og legge til ytterligere noen hundre milliarder dollar eller mer til markedet deres lokk. Men det er mindre forståelig når forskningsinstitutter kaster bort strålende sinn ved å få dem til å løse de samme problemene som andre universiteter også løser. Pokker, selv en gang svorne fiender Apple og Google samarbeide når innsatsen er høy nok.
Anbefalte videoer
"Det akademiske systemet er ikke superflinke til å fremme forskningssamarbeid," innrømmet Rouse. "Som professor har jeg en jobb å gjøre der jeg blir målt på visse ting som føderal finansiering, stipend som publiseres og studenter som jeg veileder. Hvis du ser på måten det akademiske systemet etablerer målestokken for fakultetet i forskningslaboratorier på, blir samarbeid [faktisk på en måte] nedtonet.»
Når det gjelder kontrollsystemer for bioniske lemmer, er problemet at, for å i det hele tatt kunne starte utvikler kontrollsystemer, individuelle forskningslaboratorier rundt om i verden må først bygge det underliggende maskinvare. For å gå tilbake til den tidligere analogien, det er verre enn for eksempel at Apple og Samsung utvikler konkurrerende smarttelefoner i topphemmelighet; det ville være mer som at Apple og Samsung måtte bygge sine egne operativsystemer fra bunnen av før de begynte å designe sin neste generasjon smarttelefon.
Det er her Rouses prosjekt, den Ben med åpen kildekode, spiller inn. Som forskerne bak forklarer på en dedikert nettside: «Det overordnede formålet med dette prosjektet er å forene en fragmentert felt[R]forskning innen protetisk maskinvaredesign, protesekontroll og amputert biomekanikk er for tiden utført i siloer. Hver forsker utvikler sitt eget robotbeinsystem som de kan teste kontrollstrategiene eller biomekaniske hypotesene sine på. Dette kan være vellykket på kort sikt siden hver forsker produserer publikasjoner og viderefører kunnskap. På lang sikt hindrer imidlertid denne fragmenterte forskningstilnærmingen resultater i å påvirke livene til personer med funksjonshemminger — som kulminerte i en overordnet svikt i feltet til å virkelig ha den innvirkningen som motiverte det."
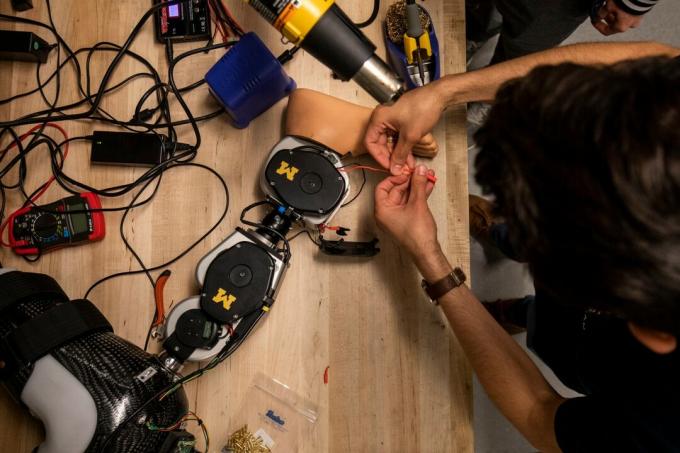
Her kommer det bioniske beinet
Open-Source-benet er, som navnet antyder, et bionisk ben med åpen kildekode som kan bli det allestedsnærværende maskinvaresystemet for å lette vekst i området for protesekontroll. Designet er enkelt (som betyr lett å montere), bærbart (lett og drevet av innebygde batterier), økonomisk (det koster mellom $10 000 og $25 000, sammenlignet med $100 000 pluss kommersielt tilgjengelige drevne proteser), skalerbare og kan tilpasses. Detaljerte instruksjoner er tilgjengelige på nettet for å følge, og Rouse og hans kolleger vil til og med bygge dem og sende dem ut til forskere når det ikke er mulig å lage en selv.

I prosessen søker prosjektet å nå tre mål. Den første av disse er å identifisere en elektromekanisk design som kan brukes til lave kostnader, høy ytelse, åpen kildekode robotiske kne- og ankelsystemer. For det andre å forstå hvordan separate protesekontrollstrategier kan kombineres for å være til fordel for amputert gang. Til slutt ønsker Open-Source Leg-prosjektet å validere sitt foreslåtte open-source system som et verktøy for forskning på protesekontroll. Hvis disse forskningsmålene kan nås, kan det vise seg å være den game-changer skaperne håper det vil være.
«I min levetid skal vi se bioniske lemmer som kan bruke nevral informasjon, enten på det kortikale eller perifere nervenivået, for å fortelle oss grove bevegelser," sa Rouse. "Det vil gi oss kontroll uten behov for sensorer ombord." Denne revolusjonen, sa han, er allerede i gang. Selv om finkornet fingerferdighet kan ta lengre tid enn dette, er det ikke nødvendigvis en sci-fi-drøm som er mange liv unna å skje.
Og hvis folk kan finne ut hvordan de kan jobbe sammen, kan det være her mye raskere.
Redaktørenes anbefalinger
- Hvordan 3D-utskrift har forandret verden av protetiske lemmer for alltid



