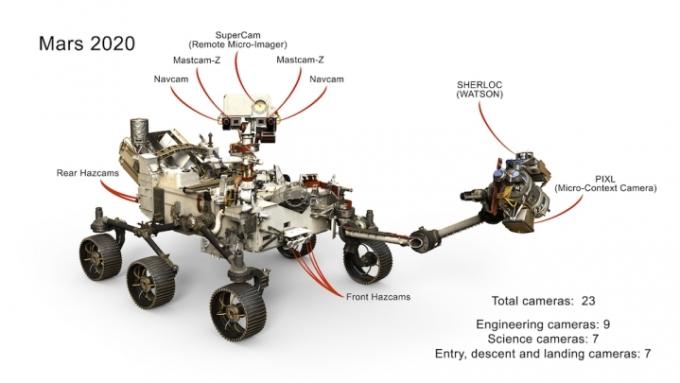
Naujausias NASA marsaeigis „Perseverance“ yra iki šiol pažangiausias, turintis daugybę technologijų, įskaitant 23 kamerų rinkinį.
Turinys
- Nusileidimo kameros
- Inžinerinės kameros
- Mokslo kameros
mes jau buvome apdorota neįtikėtina filmuota medžiaga iš kelių kamerų, užfiksuotų 2021 m. vasario 18 d. marsaeigiui priartėjus prie raudonosios planetos paviršiaus. Per kelias minutes nuo atvykimo į nusileidimo vietą viduje Jezero krateris, Perseverance taip pat perdavė keletą nejudančių vaizdų atgal į Žemę, o po kelių dienų – pirmosios aukštos kokybės nuotraukos, kuriose stebėtinai detaliai pavaizduota nauja aplinka.
Rekomenduojami vaizdo įrašai
Kadangi kameros vaidins pagrindinį vaidmenį roverio dvejų metų misijoje, pagalvojome, kad būtų gera idėja sužinoti daugiau apie kiekvieno įrenginio technologija ir ko galime tikėtis iš jų, kai Perseverance pradeda tyrinėti tolimą planetą ir ieškoti praeities ženklų gyvenimą.
Susijęs
- Šią 1,8 milijardo pikselių Marso nuotrauką „Curiosity“ marsaeigis nufotografavo 4 dienas
Nusileidimo kameros
Pagrindinis vaidmuo: fiksuokite vaizdus aukštyn ir žemyn, kai roveris leidžiasi per Marso atmosferą.

Erdvėlaivis, gabenęs Perseverance, naudojo daugiau nei keturias didelės raiškos kameras, kad užfiksuotų nesaugų nusileidimą į Marso paviršių. Filmuotoje medžiagoje (toliau) buvo lengvai pateikiamos geriausios vaizdinės medžiagos apie bet kurį iš penkių NASA nusileidimų Marse iki šiol, kameros buvo kruopščiai išdėstytos taip, kad užfiksuotų kuo daugiau važiavimo žemyn.
Ir filmuota medžiaga buvo skirta ne tik sužavėti kosmoso gerbėjus. Tai taip pat suteikė inžinieriams svarbios informacijos apie tai, kaip tiksliai elgėsi nusileidimo sistema, o tai turėtų padėti jiems sukurti geresnius erdvėlaivius būsimoms Marso misijoms.
„Perseverance Rover“ nusileidimas ir nusileidimas Marse (oficialus NASA vaizdo įrašas)
Parašiutinio vaizdo kameros
Jie buvo sumontuoti ant erdvėlaivio galinio korpuso ir nukreipti į viršų, kad užfiksuotų parašiuto išsiskleidimą ir išsipūtimą. Filmuota medžiaga inžinieriams suteikė galimybę pirmą kartą pažvelgti į parašiuto elgesį plonoje Marso aplinkoje, todėl jie galėjo patobulinti būsimų misijų dizainą.
Nusileidimo stadijos „žvelk žemyn“ kamera
Ši kamera, esanti erdvėlaivio nusileidimo stadijoje, nukreipta žemyn, kad užfiksuotų laidais nuleidžiamą roverį. ant Marso paviršiaus, nors paskutinėmis akimirkomis transporto priemonę uždengė nusileidimo etapo sukeltos dulkės varikliais.
„Rover“ vaizdo kamera
Pritvirtinta prie roverio denio, ši į viršų nukreipta kamera užfiksavo nusileidimo etapą lemiamomis paskutinėmis akimirkomis prieš nusileidimą. Vėlgi, visa ši filmuota medžiaga bus naudinga inžinieriams, projektuojantiems būsimus Marso erdvėlaivius, kurių vienas į Marsą atgabens pirmuosius astronautus.
„Rover“ „žvelk žemyn“ kamera
Ši kamera buvo sumontuota po roveriu ir nukreipta tiesiai į žemę. Jis užfiksavo nusileidimo etapo varomųjų jėgų poveikį dulkėtam paviršiui transporto priemonei prisilietus.
Inžinerinės kameros
Perseverance yra penktasis NASA marsaeigis ir, ko gero, iki šiol pats protingiausias. Dalis naujojo rinkinio apima naujos kartos inžinerines kameras (HazCam/NavCam/CacheCam), kurios nuskaitys pavojų, stebėti roverio techninės įrangos būklę ir palaikyti mėginių rinkimą. Patobulinti inžineriniai fotoaparatai turi tą patį fotoaparato korpuso dizainą, tačiau kiekvienas turi skirtingus objektyvus, kurie yra specialiai sukurti unikaliai užduočiai.
HazCams (pavojaus kameros)
Pagrindinis vaidmuo: Pagalba autonominei navigacijai
Tai buvo vienas iš šešių marsaeigių „HazCam“, kuris atskleidė pirmuosius vaizdus (žemiau) iš „Perseverance“ po dramatiško nusileidimo raudonojoje planetoje 2021 m. vasario mėn. Taip pat užfiksuota akimirka nusileidimo etape buvo atliktas kontroliuojamas avarinis nusileidimas netrukus po to, kai atnešė Perseverance į Marso paviršių.

Kadangi Marsas šiek tiek už AAA diapazono ribų, NASA paskutinis dalykas, kurio reikia, yra Perseverance įstrigti smėlio kopoje arba įvažiuoti į uolą. Štai čia ir atsiranda „HazCams“. Šios kameros su keturiomis priekyje ir dviem gale, šios kameros nuolat ieško kliūčių, atsirandančių marsaeigio kelyje, kai jis rieda per Marso paviršių.
Kompiuterio programinė įranga automatiškai analizuoja HazCams 3D vaizdus ir naudoja šią informaciją savarankiškai nuspręsdama, kur eiti. Šios savaiminio vairavimo išmanieji įtaisai leidžia „Perseverance“ tęsti veiklą ir nereikia nuolat konsultuotis su komandos nariais Žemė, nors tai komanda, kuri galiausiai nusprendžia pagrindinę roverio kelionės kryptį misija.
„HazCams“ taip pat atlieka dar vieną svarbų vaidmenį, nes padeda inžinieriams nuspręsti, kur perkelti Perseverance robotinę ranką atliekant matavimus ir nuotraukas.
NavCams (navigacijos kameros)
Pagrindinis vaidmuo: Pagalba autonominei navigacijai
NASA „Perseverance Rover“ pirmasis 360 laipsnių vaizdas į Marsą (oficialus)
Perseverance turi dvi spalvotas stereo navigacines kameras arba sutrumpintai NavCams. Jie yra maždaug 16,5 colio (42 cm) atstumu vienas nuo kito roverio centrinio stiebo viršuje ir yra įrangos, padedančios automobiliui važiuoti autonomiškai, dalis. NASA teigimu, „NavCams“ kameros yra pakankamai pažangios, kad galėtų pastebėti tokį mažą objektą kaip golfo kamuoliukas iš 82 pėdų (25 metrų) atstumu. Jie taip pat pateikia keletą nuostabių panoramų, tokių kaip aukščiau esanti, užfiksuota praėjus vos kelioms dienoms po Marso misijos.
CacheCam
Pagrindinis vaidmuo: nufotografuokite išsamius surinktų uolienų mėginių vaizdus, kai jie buvo įdėti į mėginio mėgintuvėlį.

„CacheCam“ yra roverio apačioje, pavyzdinės talpyklos viršuje. Jis bus naudojamas uoloms ir dirvožemiui fotografuoti dedamas į mėginio vamzdelius Perseverance savo tyrinėjimų metu, kai kurios medžiagos greičiausiai bus sugrąžintos į Žemę būsimos misijos metu. „CacheCam“ taip pat leis mokslininkams registruoti medžiagą, kurią jie renka iš Marso paviršiaus.
Mokslo kameros
„Perseverance“ pažangūs mokslo fotoaparatai yra „Mastcam-Z“, „SuperCam“, „PIXL“, „SHERLOC“ ir „Watson“. Kiekvienas iš jų yra skirtas atlikti gyvybiškai svarbų darbą, kuris galėtų padėti nustatyti, ar kadaise Marse buvo gyvybė.
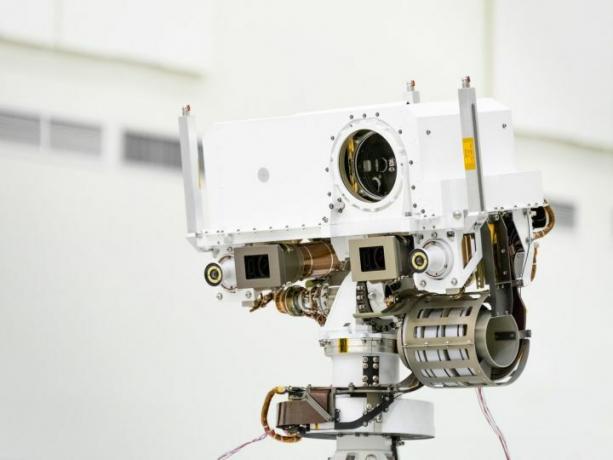
Mastcam-Z
Pagrindinis vaidmuo: fotografuokite didelės raiškos vaizdo įrašus, spalvotas panoramines nuotraukas ir 3D vaizdus, vaizduojantį Marso paviršių ir atmosferos ypatybes.
Mastcam-Z Jį sudaro dvi kameros (įdėtos tarp „NavCams“ kamerų), kurios siūlo 360 laipsnių vaizdą į aplinką. Jame taip pat yra mastelio keitimo funkcija (taip, „Z“ reiškia priartinimą), nors ji yra pažangesnė nei jūsų išmanusis telefonas fotoaparatas. Tiesą sakant, NASA teigimu, „Mastcam-Z“ „gali matyti tokius mažus bruožus kaip kambarinė muselė – visą atstumą, kuris yra maždaug futbolo aikštės ilgio“.
Žemiau pateiktame paveikslėlyje, kurį sudaro 142 atskiri Mastcam-Z kadrai, galite gerai suprasti įspūdingą Mastcam-Z galią. Pabandykite paspausti mygtuką „+“, kad priartintumėte, kad gautumėte daugiau informacijos, arba eikite čia kad padarytumėte vaizdą per visą ekraną.
Naudodamas tokią nuostabią technologiją, kaip ši, Mastcam-Z taip pat gali padėti mokslininkams nuspręsti, kurias sritis verta toliau tirti NASA ieškant praeities gyvenimo įrodymų.
SuperCam
Pagrindinis vaidmuo: nustatyti cheminę uolienų ir dirvožemio sudėtį, įskaitant jų atominę ir molekulinę sudėtį.
Pagal savo pavadinimą „SuperCam“ yra sumontuotas pačiame „Perseverance“ stiebo viršuje ir turi keletą labai įspūdingų išmaniųjų elementų. Pirmiausia, jis gali iššauti lazerį, nors, laimei, jis nebus nukreiptas į jokius marsiečius, su kuriais galime susidurti. Vietoj to, lazeris sutelks dėmesį į mineralinius taikinius, kurių roverio robotinė ranka negali pasiekti.
Šaudant į mažą uolienų plotą iš maždaug 20 pėdų (7 metrų) atstumo, lazeris sukels karštų dujų, sudarytų iš laisvai plūduriuojančių jonų ir elektronų, susidarymą. Tada „SuperCam“ analizuos išgaravusią uolieną, kad sužinotų jos elementinę sudėtį. Ši procedūra gali atskleisti organinius junginius, kurie taip pat galėtų būti susiję su buvusia Marse gyvybe.
PIXL (planetinis rentgeno litochemijos instrumentas)
Pagrindinis vaidmuo: labai tiksliai išmatuokite uolienų cheminę sudėtį
PIXL randamas roverio roboto rankos gale ir naudoja rentgeno spindulius, kad nustatytų cheminius elementus tikslinėse vietose, kurios, NASA teigimu, gali būti tokios mažos kaip valgomosios druskos grūdelis. PIXL turi mikrokonteksto kamerą, kuri pateiks vaizdus, kurie padės susieti elementinės kompozicijos žemėlapius su matomomis tikslinės srities savybėmis.
SHERLOC (gyvenamos aplinkos nuskaitymas naudojant ramaną ir liuminescenciją organinėms ir cheminėms medžiagoms)
Pagrindinis vaidmuo: smulkus mineralų, organinių molekulių ir galimų biologinių ženklų aptikimas

SHERLOC, kuris taip pat yra „Perseverance“ roboto rankos gale, turi kameras, spektrometrus ir lazerį. Prietaisas ieško organinių medžiagų ir mineralų, kuriuos pakeitė vandeninga aplinka, ieškodamas praeities mikrobų gyvenimo požymių. SHERLOC taip pat vaidina pagrindinį vaidmenį naujų skafandrų, skirtų pirmajai žmogaus misijai į Marsą, tyrimai.
WATSON (plataus kampo topografinis jutiklis, skirtas operacijoms ir inžinerijai)
Pagrindinis vaidmuo: fotografuokite uolų tekstūras iš arti
Su tokiais pavadinimais kaip SHERLOC ir WATSON, jums nereikia būti super žvalgybininku, kad suprastumėte, jog šios dvi kameros veikia kartu Marso misijos metu.
Kaip ir SHERLOC, WATSON taip pat yra roverio roboto rankos gale. Spalvota kamera skirta suteikti mokslininkams duomenis apie Marso uolienų tekstūras ir struktūras. „WATSON užfiksuoja vaizdus, kurie peržengia mastelį iš labai detalių vaizdų ir žemėlapių, kuriuos SHERLOC renka Marso mineralai ir organinės medžiagos iki platesnių mastelių, kurias SuperCam ir Mastcam-Z stebi iš stiebo. sakė.
Turėdamas tiek daug kamerų ir kitos mokslinės įrangos marsaeigyje, „Perseverance“ tikrai padarys įdomių atradimų, tyrinėdamas Marso paviršių per savo dvejų metų misiją. Taigi būtinai patikrinkite, ar nėra naujinimų.
Redaktorių rekomendacijos
- Naujoji Perseverance panorama leidžia priartinti, kad pamatytumėte nuostabias detales



