Si vous vouliez parcourir une grande distance et disposiez des meilleurs sprinteurs du monde, les feriez-vous courir les uns contre les autres ou travailler ensemble dans un relais? C'est là, en substance, le problème Elliott Rousseau, ingénieur biomédical et directeur du laboratoire de neurobionique de l'Université du Michigan à Ann Arbor, est aux prises depuis plusieurs années.
Contenu
- Promouvoir la collaboration
- Voici la jambe bionique
Rouse, un ingénieur, est l'un des nombreux à travailler au développement d'un système de contrôle pour les jambes bioniques, membres artificiels qui utilisent divers signaux du porteur pour agir et se déplacer comme des membres biologiques.
La jambe bionique open source vise à faire progresser rapidement les prothèses
"Le plus grand défi dans la création d'une jambe robotique est probablement le contrôleur impliqué, qui leur dit quoi faire", a déclaré Rouse à Digital Trends. « Chaque fois que le porteur fait un pas, un pas doit être initié. Et lorsqu'ils changent, la jambe doit savoir que leur activité a changé et bouger pour s'adapter à cette activité différente. S’il commet une erreur, la personne pourrait être gravement blessée – peut-être en tombant dans des escaliers, par exemple. Il existe des personnes talentueuses partout dans le monde qui étudient ces défis en matière de contrôle. Ils investissent des années et des centaines de milliers de dollars dans la construction d’une jambe robotique. C’est ainsi que les choses se passent depuis les débuts de ce domaine.
En rapport
- Climeworks veut nettoyer l'atmosphère avec une flotte d'aspirateurs de la taille d'un bâtiment
Promouvoir la collaboration
Seulement, selon Rouse, c’est un système défectueux. Il est compréhensible que les entreprises de haute technologie concurrentes se cachent dans le secret lorsqu’elles développent le Next Big. Ce qu'ils espèrent vendre des milliards d'unités et ajouter quelques centaines de milliards de dollars supplémentaires ou plus à leur marché. casquette. Mais il est moins compréhensible que les instituts de recherche gaspillent des esprits brillants en les obligeant à résoudre les mêmes problèmes que d’autres universités résolvent également. Zut, même autrefois les ennemis jurés d'Apple et de Google travailler ensemble lorsque les enjeux sont suffisamment élevés.
Vidéos recommandées
« Le système universitaire n’est pas très doué pour favoriser la recherche collaborative », a admis Rouse. « En tant que professeur, j’ai un travail à faire où je suis mesuré sur certains éléments comme le financement fédéral, les subventions publiées et les étudiants que je mentore. Si vous regardez la manière dont le système universitaire établit la référence pour les professeurs dans les laboratoires de recherche, la collaboration est [en fait en quelque sorte] sous-estimée.
En ce qui concerne les systèmes de contrôle des membres bioniques, le problème est que, pour pouvoir démarrer En développant des systèmes de contrôle, les laboratoires de recherche individuels du monde entier doivent d'abord construire les systèmes sous-jacents. matériel. Pour revenir à l’analogie précédente, c’est pire que, disons, Apple et Samsung développant des smartphones concurrents en secret; ce serait plutôt comme si Apple et Samsung devaient créer leur propre système d'exploitation informatique à partir de zéro avant de commencer à concevoir leur nouvelle génération. téléphone intelligent.
C’est là que le projet de Rouse, le Jambe open source, entre en jeu. Comme l’expliquent les chercheurs à l’origine de ce projet sur une page Web dédiée: « L’objectif primordial de ce projet est d’unir un La recherche sur le terrain fragmentée en matière de conception de matériel prothétique, de contrôle prothétique et de biomécanique des amputés est actuellement menée en silos. Chaque chercheur développe son propre système de jambe robotique sur lequel tester ses stratégies de contrôle ou ses hypothèses biomécaniques. Cela peut être un succès à court terme puisque chaque chercheur produit des publications et fait progresser les connaissances. Cependant, à long terme, cette approche de recherche fragmentée empêche les résultats d’avoir un impact sur la vie des personnes handicapées – aboutissant à un échec global du domaine à véritablement avoir l’impact que l’a motivé.
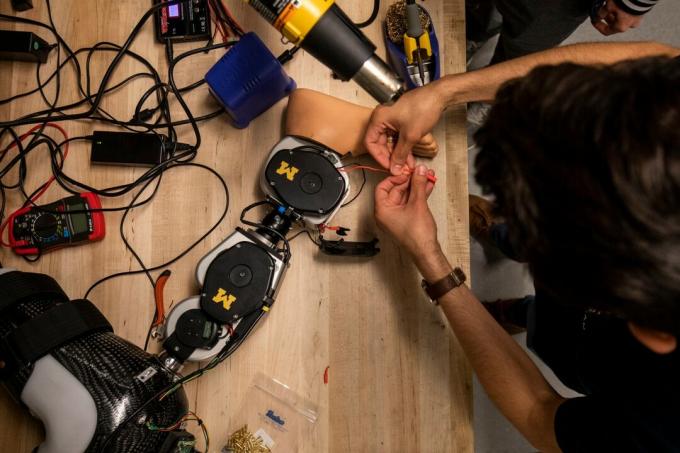
Voici la jambe bionique
L'Open-Source Leg est, comme son nom l'indique, une jambe bionique open source qui pourrait devenir le système matériel omniprésent pour faciliter la croissance dans le domaine du contrôle des prothèses. La conception est simple (c'est-à-dire facile à assembler), portable (légère et alimentée par des batteries intégrées), économique (ça coûte entre 10 000 $ et 25 000 $, comparativement aux prothèses motorisées de plus de 100 000 $ disponibles dans le commerce), évolutives et personnalisable. Des instructions détaillées sont disponibles en ligne, et Rouse et ses collègues les construiront même et les enverront aux chercheurs lorsqu'il n'est pas possible d'en créer une eux-mêmes.

Ce faisant, le projet cherche à atteindre trois objectifs. Le premier d’entre eux consiste à identifier une conception électromécanique pouvant être utilisée pour des systèmes robotiques de genou et de cheville open source à faible coût et hautes performances. Deuxièmement, comprendre comment des stratégies distinctes de contrôle des prothèses peuvent être combinées afin de bénéficier à la démarche des amputés. Enfin, le projet Open-Source Leg souhaite valider son système open source proposé comme outil de recherche sur le contrôle des prothèses. Si ces objectifs de recherche peuvent être atteints, cela pourrait changer la donne que ses créateurs espèrent.
« De mon vivant, nous verrons des membres bioniques qui peuvent utiliser des informations neuronales, que ce soit au niveau cortical ou nerveux périphérique, pour nous indiquer les mouvements brutaux », a déclaré Rouse. "Cela nous donnera le contrôle sans avoir besoin de capteurs embarqués." Cette révolution, dit-il, est déjà en train de se produire. Bien qu’un mouvement adroit et fin puisse prendre plus de temps que cela, il ne s’agit pas nécessairement d’un rêve de science-fiction qui sera avant plusieurs vies avant de se réaliser.
Et si les gens parviennent à trouver comment travailler ensemble, cela pourrait être beaucoup plus rapide.
Recommandations des rédacteurs
- Comment l’impression 3D a changé à jamais le monde des prothèses



