Kui sooviksite läbida suurt distantsi ja teie käsutuses oleksid maailma parimad sprinterid, kas laseksite neil üksteise vastu joosta või koos teatevõistlust teha? Sisuliselt see probleem ongi Elliott Rouse, biomeditsiiniinsener ja Michigani ülikooli neurobioonika labori direktor Ann Arboris, on sellega maadelnud juba mitu aastat.
Sisu
- Koostöö edendamine
- Siit tuleb biooniline jalg
Rouse, insener, on üks paljudest, kes töötab välja biooniliste jalgade juhtimissüsteemi, tehisjäsemed mis kasutavad erinevaid kandja signaale, et käituda ja liikuda nagu bioloogilised jäsemed.
Avatud lähtekoodiga biooniline jalg on mõeldud proteesimise kiireks edendamiseks
"Tõenäoliselt on robotjala loomise suurim väljakutse kaasatud kontroller, kes ütleb neile, mida teha," ütles Rouse Digital Trendsile. "Iga kord, kui kandja astub sammu, on vaja samm algatada. Ja kui nad vahetavad, peab jalg teadma, et nende tegevus on muutunud, ja liigutama, et selle erineva tegevusega kohaneda. Kui see teeb vea, võib inimene saada väga-väga vigastada – võib-olla näiteks mõnest trepist alla kukkudes. Üle maailma on andekad inimesed, kes uurivad neid kontrolliprobleeme. Nad investeerivad aastaid oma ajast ja sadu tuhandeid dollareid robotjala ehitamiseks. Nii on asjad olnud selle valdkonna algusest peale."
Seotud
- Climeworks soovib atmosfääri puhastada hoonesuuruste tolmuimejate pargiga
Koostöö edendamine
Ainult Rouse'i sõnul on see katkine süsteem. On arusaadav, et konkureerivad kõrgtehnoloogilised ettevõtted jäävad Next Bigi väljatöötamisel saladusse. Asi, mida nad loodavad, müüb gajillion ühikut ja lisab nende turule veel paarsada miljardit dollarit või rohkem kork. Kuid on vähem arusaadav, kui uurimisinstituudid raiskavad hiilgavaid mõistusi, pannes nad lahendama samu probleeme, mida lahendavad ka teised ülikoolid. Kurat, isegi kunagi vannutatud vaenlased Apple ja Google teha koostööd, kui panused on piisavalt kõrged.
Soovitatavad videod
"Akadeemiline süsteem ei ole koostööuuringute edendamiseks eriti hea, " tunnistas Rouse. „Professorina on mul töö, kus mind mõõdetakse teatud asjadega, nagu föderaalne rahastamine, avaldatavad toetused ja üliõpilased, keda juhendan. Kui vaadata, kuidas akadeemiline süsteem seab teaduslaborites õppejõududele võrdlusaluse, on koostöö [tegelikult omamoodi] tähtsusetu.
Mis puutub biooniliste jäsemete juhtimissüsteemidesse, siis probleem on selles, et isegi käivitada juhtimissüsteemide väljatöötamisel peavad üksikud uurimislaborid üle kogu maailma esmalt selle aluseks oleva süsteemi looma riistvara. Varasema analoogia juurde tagasi pöördudes on see hullem, kui näiteks Apple ja Samsung arendavad ülisalajane konkureerivaid nutitelefone; see oleks pigem selline, nagu Apple ja Samsung peaksid enne järgmise põlvkonna kavandamist oma arvutioperatsioonisüsteemid nullist üles ehitama nutitelefoni.
See on koht, kus Rouse'i projekt Avatud lähtekoodiga jalg, tuleb mängu. Nagu selle taga olevad teadlased spetsiaalsel veebilehel selgitavad: "Selle projekti üldeesmärk on ühendada a killustatud väliuuringuid proteeside riistvara disaini, proteeside kontrolli ja amputeeritud biomehaanika alal tehakse praegu silohoidlad. Iga teadlane töötab välja oma robotjalgade süsteemi, mille peal saab testida oma juhtimisstrateegiaid või biomehaanilisi hüpoteese. See võib lühikese aja jooksul olla edukas, kuna iga teadlane koostab publikatsioone ja täiendab teadmisi. Kuid pikemas perspektiivis takistab selline killustatud uurimistöö tulemusi mõjutamast inimeste elu puuetega inimesed – mis kulmineerub valdkonna üldise suutmatusega seda tõeliselt mõjutada motiveeris seda."
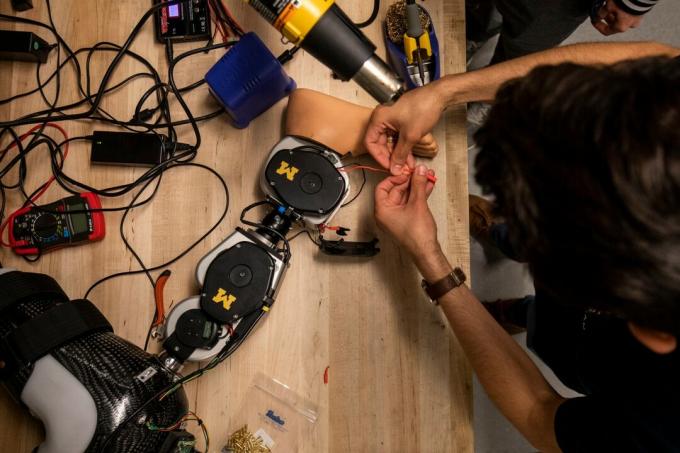
Siit tuleb biooniline jalg
Avatud lähtekoodiga jalg on, nagu nimigi ütleb, avatud lähtekoodiga biooniline jalg, millest võib saada üldlevinud riistvarasüsteem, mis hõlbustab proteeside kontrolli valdkonna kasvu. Disain on lihtne (see tähendab kergesti kokkupandav), kaasaskantav (kerge ja toidab pardaakudega), ökonoomne (see maksab vahemikus 10 000–25 000 dollarit, võrreldes 100 000 dollariga pluss kaubanduslikult saadavate elektriliste proteesidega), skaleeritav ja kohandatav. Üksikasjalikud juhised on veebis järgimiseks saadaval ning Rouse ja tema kolleegid koostavad need isegi ja saadavad teadlastele välja, kui ise pole võimalik seda luua.

Selle käigus püüab projekt saavutada kolme eesmärki. Esimene neist on tuvastada elektromehaaniline konstruktsioon, mida saab kasutada odavate, suure jõudlusega avatud lähtekoodiga robot-põlve- ja pahkluusüsteemide jaoks. Teiseks, et mõista, kuidas saab kombineerida erinevaid proteesi kontrollimise strateegiaid, et amputeeritud kõnnak oleks kasulik. Lõpuks soovib avatud lähtekoodiga jala projekt kinnitada oma kavandatud avatud lähtekoodiga süsteemi proteeside kontrollimise uurimise vahendina. Kui need uurimiseesmärgid saavutatakse, võib see osutuda mängu muutjaks, mida selle loojad loodavad.
"Minu eluajal me näeme bioonilised jäsemed, mis võivad kasutada närviteavet, kas ajukoore või perifeerse närvi tasemel, et öelda meile jämedat liikumist, ”ütles Rouse. "See annab meile kontrolli, ilma et oleks vaja pardaandureid." See revolutsioon on tema sõnul juba toimumas. Kuigi peeneteraline osav liikumine võib kesta kauem kui see, ei pruugi see olla ulmeline unistus, mille täitumine on paljude elude kaugusel.
Ja kui inimesed saavad aru, kuidas koostööd teha, võib see olla palju kiiremini käes.
Toimetajate soovitused
- Kuidas 3D-printimine on jäsemeproteeside maailma igaveseks muutnud



