หากคุณต้องการวิ่งระยะทางไกลและมีนักวิ่งระยะสั้นที่เก่งที่สุดในโลกไว้คอยบริการ คุณจะให้พวกเขาวิ่งแข่งกันหรือวิ่งผลัดร่วมกันหรือไม่? โดยพื้นฐานแล้วนั่นคือปัญหา เอลเลียต เราส์Ann Arbor วิศวกรชีวการแพทย์และผู้อำนวยการ Neurobionics Lab แห่งมหาวิทยาลัยมิชิแกน ต้องต่อสู้ดิ้นรนเป็นเวลาหลายปี
สารบัญ
- ส่งเสริมความร่วมมือ
- ขาไบโอนิคมาแล้ว
เราส์เป็นวิศวกร เป็นหนึ่งในหลายๆ คนที่ทำงานเพื่อพัฒนาระบบควบคุมสำหรับขาไบโอนิค แขนขาเทียม ที่ใช้สัญญาณต่างๆ จากผู้สวมใส่ในการกระทำและเคลื่อนไหวเหมือนแขนขาทางชีวภาพ
ขาไบโอนิคแบบโอเพ่นซอร์สมีเป้าหมายเพื่อพัฒนาขาเทียมให้ก้าวหน้าอย่างรวดเร็ว
“ความท้าทายที่ใหญ่ที่สุดในการสร้างขาหุ่นยนต์น่าจะเป็นตัวควบคุมที่เกี่ยวข้องโดยบอกพวกเขาว่าต้องทำอะไร” Rouse กล่าวกับ Digital Trends “ทุกครั้งที่ผู้สวมใส่ก้าว ก็ต้องเริ่มก้าวหนึ่ง และเมื่อพวกเขาเปลี่ยน ขาจะต้องรู้ว่ากิจกรรมของพวกเขาเปลี่ยนไป และขยับเพื่อรองรับกิจกรรมที่แตกต่างกันนั้น หากทำผิดพลาด บุคคลนั้นอาจได้รับบาดเจ็บสาหัส เช่น อาจตกบันได เป็นต้น มีผู้มีความสามารถทั่วโลกกำลังศึกษาความท้าทายในการควบคุมเหล่านี้ พวกเขาลงทุนเวลาหลายปีและทุ่มเงินหลายแสนดอลลาร์เพื่อสร้างขาหุ่นยนต์ มันเป็นสิ่งที่เกิดขึ้นตั้งแต่เริ่มสาขานี้”
ที่เกี่ยวข้อง
- Climeworks ต้องการทำความสะอาดบรรยากาศด้วยเครื่องดูดฝุ่นขนาดเท่าอาคาร
ส่งเสริมความร่วมมือ
ตามข้อมูลของ Rouse เท่านั้น นั่นเป็นระบบที่พัง เป็นที่เข้าใจได้ว่าบริษัทเทคโนโลยีขั้นสูงที่แข่งขันกันปกปิดความลับเมื่อพวกเขากำลังพัฒนา Next Big สิ่งที่พวกเขาหวังว่าจะขายได้หนึ่งพันล้านหน่วยและเพิ่มอีกสองสามแสนล้านดอลลาร์หรือมากกว่านั้นในตลาดของพวกเขา หมวก แต่จะเข้าใจได้น้อยลงเมื่อสถาบันวิจัยเสียคนฉลาดโดยให้พวกเขาแก้ไขปัญหาเดียวกันกับที่มหาวิทยาลัยอื่นกำลังแก้ไขเช่นกัน เฮ็ค แม้กระทั่งครั้งหนึ่งเคยสาบานว่าเป็นศัตรูกับ Apple และ Google ทำงานร่วมกันเมื่อเดิมพันสูงพอ.
วิดีโอแนะนำ
“ระบบการศึกษาไม่ค่อยดีนักในการส่งเสริมการวิจัยร่วมกัน” Rouse ยอมรับ “ในฐานะศาสตราจารย์ ฉันมีงานที่ต้องทำโดยวัดจากบางอย่าง เช่น เงินทุนของรัฐบาลกลาง เงินช่วยเหลือที่ได้รับการตีพิมพ์ และนักเรียนที่ฉันให้คำปรึกษา หากคุณดูวิธีที่ระบบการศึกษาสร้างเกณฑ์มาตรฐานสำหรับคณาจารย์ในห้องปฏิบัติการวิจัย การทำงานร่วมกันนั้น [แท้จริงแล้ว] ไม่มีการเน้นย้ำ”
เมื่อพูดถึงระบบควบคุมแขนขาไบโอนิค ปัญหาก็คือ เพื่อให้สามารถเริ่มต้นได้ การพัฒนาระบบควบคุมห้องปฏิบัติการวิจัยแต่ละแห่งทั่วโลกต้องสร้างพื้นฐานก่อน ฮาร์ดแวร์. หากต้องการกลับไปสู่การเปรียบเทียบก่อนหน้านี้ นั่นแย่กว่าที่ Apple และ Samsung พัฒนาสมาร์ทโฟนคู่แข่งอย่างเป็นความลับสุดยอด มันจะเหมือนกับว่า Apple และ Samsung ต้องสร้างระบบปฏิบัติการคอมพิวเตอร์ของตัวเองตั้งแต่เริ่มต้นก่อนที่จะเริ่มออกแบบรุ่นต่อไป สมาร์ทโฟน.
นี่คือที่มาของโครงการของ Rouse ขาโอเพ่นซอร์สเข้ามามีบทบาท ดังที่นักวิจัยที่อยู่เบื้องหลังได้อธิบายไว้บนหน้าเว็บเฉพาะว่า “จุดประสงค์หลักของโครงการนี้คือเพื่อรวมกลุ่มก การวิจัยภาคสนามแบบกระจัดกระจายในการออกแบบฮาร์ดแวร์กายอุปกรณ์ การควบคุมกายอุปกรณ์ และชีวกลศาสตร์ของผู้พิการกำลังดำเนินการอยู่ใน ไซโล นักวิจัยแต่ละคนพัฒนาระบบขาหุ่นยนต์ของตนเองเพื่อทดสอบกลยุทธ์การควบคุมหรือสมมติฐานทางชีวกลศาสตร์ ซึ่งอาจประสบความสำเร็จได้ในระยะสั้นเนื่องจากนักวิจัยแต่ละคนผลิตสิ่งพิมพ์และต่อยอดองค์ความรู้ อย่างไรก็ตาม ในระยะยาว วิธีการวิจัยแบบกระจัดกระจายนี้จะขัดขวางผลลัพธ์จากผลกระทบต่อชีวิตของ บุคคลทุพพลภาพ — ซึ่งนำไปสู่ความล้มเหลวอย่างครอบคลุมในการที่จะทำให้เกิดผลกระทบดังกล่าวอย่างแท้จริง กระตุ้นให้มัน”
ขาไบโอนิคมาแล้ว
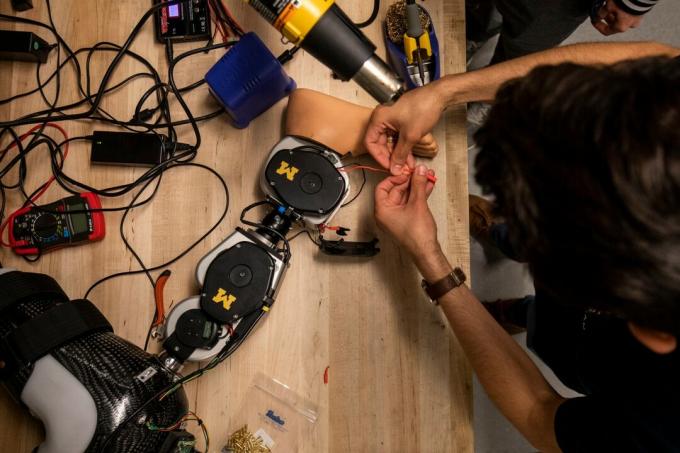
ขาโอเพ่นซอร์สนั้นเป็นขาไบโอนิคแบบโอเพ่นซอร์สที่อาจกลายเป็นระบบฮาร์ดแวร์ที่แพร่หลายเพื่ออำนวยความสะดวกในการเติบโตในด้านการควบคุมขาเทียม การออกแบบนั้นเรียบง่าย (หมายถึงประกอบได้ง่าย) พกพาได้ (น้ำหนักเบาและใช้พลังงานจากแบตเตอรี่ในตัว) ประหยัด (มีค่าใช้จ่าย ระหว่าง 10,000 ถึง 25,000 ดอลลาร์สหรัฐฯ เทียบกับอุปกรณ์เทียมขับเคลื่อนที่มีจำหน่ายในท้องตลาดมูลค่า 100,000 ดอลลาร์สหรัฐฯ บวกด้วย) สามารถปรับขนาดได้และ ปรับแต่งได้ มีคำแนะนำโดยละเอียดให้ปฏิบัติตามทางออนไลน์ และ Rouse และเพื่อนร่วมงานของเขาจะสร้างพวกมันและจัดส่งให้กับนักวิจัยเมื่อไม่สามารถสร้างพวกมันเองได้

ในกระบวนการนี้ โครงการพยายามที่จะบรรลุเป้าหมายสามประการ ประการแรกคือการระบุการออกแบบระบบเครื่องกลไฟฟ้าที่สามารถใช้กับระบบหัวเข่าและข้อเท้าหุ่นยนต์แบบโอเพ่นซอร์สที่มีต้นทุนต่ำ ประสิทธิภาพสูง ประการที่สอง เพื่อทำความเข้าใจว่าสามารถรวมกลยุทธ์การควบคุมอุปกรณ์เทียมที่แยกจากกันเพื่อให้เกิดประโยชน์ต่อการเดินของผู้พิการได้อย่างไร สุดท้ายนี้ โครงการ Open-Source Leg ต้องการตรวจสอบความถูกต้องของระบบโอเพ่นซอร์สที่นำเสนอว่าเป็นเครื่องมือสำหรับการวิจัยเกี่ยวกับการควบคุมอวัยวะเทียม หากสามารถบรรลุเป้าหมายการวิจัยเหล่านี้ได้ ก็อาจกลายเป็นผู้เปลี่ยนเกมที่ผู้สร้างหวังว่าจะเป็นเช่นนั้น
“ในช่วงชีวิตของฉัน เราจะได้เห็น แขนขาไบโอนิคที่สามารถใช้ข้อมูลประสาทได้ทั้งในระดับเยื่อหุ้มสมองหรือเส้นประสาทส่วนปลายเพื่อบอกเราถึงการเคลื่อนไหวโดยรวม” เราส์กล่าว “นั่นจะทำให้เราควบคุมได้โดยไม่ต้องใช้เซ็นเซอร์ออนบอร์ด” เขากล่าวว่าการปฏิวัติครั้งนี้กำลังเกิดขึ้นแล้ว แม้ว่าการเคลื่อนไหวที่กระฉับกระเฉงอย่างปราณีตอาจใช้เวลานานกว่านี้ แต่ก็ไม่จำเป็นต้องเป็นความฝันแนวไซไฟที่จะเกิดขึ้นอีกตลอดชีวิต
และหากผู้คนสามารถหาวิธีการทำงานร่วมกันได้ ก็อาจมาถึงได้เร็วขึ้นมาก
คำแนะนำของบรรณาธิการ
- การพิมพ์ 3 มิติได้เปลี่ยนแปลงโลกแห่งแขนขาเทียมไปตลอดกาลอย่างไร


