En gång lite mer än en Hollywood-liknande dröm, blev autonoma bilar verklighet på 2010-talet, till stor del tack vare forskning som utfördes av teknikföretag som Google. Även om de inte har gått samman i mainstream ännu och du inte kan köpa en när du skriver, loggar självkörande prototyper miljontals mil på vår nations vägar årligen.
Innehåll
- Den förarlösa drömmen börjar
- John McCarthys robo-chaufför
- Inga händer över Amerika
- Grand Challenge är för utmanande
- Parkering blir smartare
- Google söker efter ett svar
- De stora biltillverkarna dyker in
- Det första dödsfallet i autonoma bilar
- A.I. kommer till självkörande bilar
- Vad kommer härnäst?
- Autonominivåer förklaras
Att komprimera historien om självkörande bilar till färre än 10 milstolpar är inte lätt, men vi har gjort vårt bästa.
Rekommenderade videor
Den förarlösa drömmen börjar
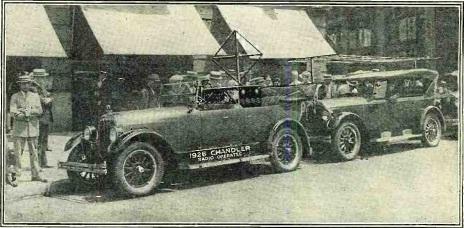
Det tog inte lång tid efter bilens födelse för uppfinnare att börja tänka på autonoma fordon. 1925, uppfinnaren Francis Houdina demonstrerade en radiostyrd bil, som han körde genom Manhattans gator utan någon vid ratten. Enligt en periodisk rapport från New York Times kunde det radiostyrda fordonet starta sin motor, växla växlar och ljuda på sitt horn "som om en fantomhand satt vid ratten."
Som en rolig sida lät Houdinas namn tillräckligt likt den berömda flyktkonstnären och illusionisten Harry Houdinis namn så att många trodde att detta var Houdinis senaste trick. Houdini besökte Houdina Company och hamnade i ett fysiskt bråk, under vilken han krossade en elektrisk ljuskrona.
John McCarthys robo-chaufför
1969, John McCarthy - som hyllas som en av grundarna till artificiell intelligens - beskrev något som liknar det moderna autonoma fordonet i en uppsats med titeln "Datorstyrda bilar.” McCarthy hänvisade till en "automatisk chaufför" som kan navigera på allmän väg via en "tv-kameraingång som använder samma visuella indata som är tillgänglig för den mänskliga föraren."
Han skrev att användare borde kunna ange en destination med hjälp av ett tangentbord, vilket sedan skulle uppmana bilen att omedelbart köra dem dit. Ytterligare kommandon skulle tillåta användare att ändra destination, stanna vid en toalett eller restaurang, sakta ner eller snabba upp i händelse av en nödsituation. Inget sådant fordon byggdes, men McCarthys uppsats redogjorde för uppdraget för andra forskare att arbeta mot.
Inga händer över Amerika
Neural nätverksbaserad autonom körning
I början av 1990-talet, Carnegie Mellon forskare Dean Pomerleau skrev en doktorsexamen. avhandling som beskriver hur neurala nätverk skulle kunna tillåta ett självkörande fordon att ta in råa bilder från vägen och mata ut styrkontroller i realtid. Pomerleau var inte den enda forskaren som arbetade med självkörande bilar, men hans användning av neurala nät visade sig vara bra effektivare än alternativa försök att manuellt dela in bilder i kategorier "väg" och "icke-väg".
1995 tog Pomerleau och forskarkollegan Todd Jochem med sig deras Navlab självkörande bilsystem på vägen. Deras autonoma minivan med bara ben (de var tvungna att kontrollera hastighet och bromsning) reste 2 797 miles kust till kust från Pittsburgh till San Diego på en resa som paret kallade "No Hands Across America."
Grand Challenge är för utmanande
DARPA tillkännagav sin första Grand Challenge 2002. Det erbjöd forskare från toppforskningsinstitutioner ett pris på 1 miljon dollar om de kunde bygga ett autonomt fordon som kunde navigera en 142 mil lång bana genom Mojaveöknen.
Utmaningen hölls 2004. Ingen av de 15 deltagarna kunde genomföra kursen. Det "vinnande" bidraget täckte mindre än 8 miles på flera timmar innan det fattade eld. Det var ett skadligt slag mot målet att bygga riktiga självkörande bilar; efter att nyheten om branden skapat rubriker antog många att full autonomi var omöjlig att nå.
Parkering blir smartare
Audi Piloted Parking (Audis självparkerande bil)
Medan autonoma fordon fortfarande såg ut som science fiction på 2000-talet började självparkeringssystem dyka upp antingen som standard- eller tillvalsutrustning (och mestadels på lyxbilar). De visade att sensorer var nära att kunna hantera relativt utmanande verkliga förhållanden, som parallell parkering i trånga utrymmen.
Toyotas hybrid Prius erbjöd automatisk parallellparkeringsassistans 2003, medan Lexus snart lade till ett liknande system till LS, dess flaggskepp sedan. Ford lanserade Active Park Assist 2009 och BMW följde efter ett år senare.
Google söker efter ett svar

Google lanserade i hemlighet sitt Self-Driving Car Project 2009. Känd som Waymo 2020, leddes det ursprungligen av Sebastian Thrun, tidigare chef för Stanford Artificial Intelligence Laboratory och meduppfinnaren av Google Street View. Det tog några år för företaget att meddela att deras prototyper tillsammans hade kört 300 000 mil under datorkontroll utan en enda olycka, en imponerande bedrift som fångade många.
2014 avslöjade den en autonom prototyp utan ratt, gaspedal eller bromspedal; den var 100 % autonom. Waymo är allmänt hyllad som den obestridda ledaren inom självkörande teknik.
De stora biltillverkarna dyker in

År 2013, bilföretag inklusive General Motors, Ford, Mercedes-Benz och BMW arbetade med sin egen självkörande teknik. Verklig autonomi visade sig vara svårare att uppnå än många antog, både ur teknisk och juridisk synvinkel, och den teknik som var tillgänglig för konsumenter på 2010-talet var i bästa fall delvis automatiserad.
Det första dödsfallet i autonoma bilar

Påståenden om att självkörande teknik är säkrare än mänskliga förare ifrågasattes när en av Ubers Volvo XC90-baserade prototyper slog och dödade 49-åriga Elaine Herzberg när hon korsade en gata i Arizona. Trots att hon gick på jäv, ansågs kraschen vara helt undvikbar. Poliser drog slutsatsen att Ubers säkerhetsförare (som är tänkt att ta över i händelse av en nödsituation) tittade på Hulu till en halv sekund före nedslaget.
A.I. kommer till självkörande bilar

På CES 2018, Nvidia presenterade ett nytt självkörande bilchip, kallat Xavier, som innehåller artificiell intelligens. Företaget meddelade då att det var det samarbetar med Volkswagen att utveckla A.I. för framtida självkörande bilar. Även om det inte är det första försöket att genomsyra autonoma bilar med A.I. (Toyota undersökte redan konceptet med MIT och Stanford), är Volkswagen-Nvidia-samarbetet det första som kopplar A.I. till produktionsklar hårdvara. Det öppnar upp möjligheten för självkörande bilar att prestera bättre, liksom för nya bekvämlighetsfunktioner som digitala assistenter.
Vad kommer härnäst?
År 2020 har de flesta biltillverkare svalnat sina ambitioner för självkörande bilar och tagit ett mycket mer realistiskt tillvägagångssätt för att utveckla tekniken. Det finns inte en enda autonom bil som allmänheten kan köpa, men vissa företag tror att de är nära att knäcka koden. Miljarder dollar och ett avundsvärt monopol står på spel.
Tesla säljer ett tillvalspaket som heter Full Self-Driving, men dess bilar är inte autonoma på något sätt; den tyska regeringen bad särskilt den att sluta använda denna term. Volkswagen är utveckla tekniken internt, och den lovade att distribuera autonoma skåpbilar i retrostil under VM 2022. Och tyska leverantören Bosch sammansatta krafter med Mercedes-Benz moderbolag Daimler för att sätta autonoma S-Klass-baserade prototyper på gatorna i San Jose. Andra partnerskap, projekt, framgångar och misslyckanden kommer utan tvekan att dyka upp i början av 2020-talet.
Autonominivåer förklaras
Även om termerna "självkörande" och "autonom" slängs runt mycket, har inte alla fordon samma kapacitet. De SAE autonomi skala används för att bestämma olika nivåer av autonom förmåga. Här är en uppdelning.
Nivå 0: Ingen automatisering. Föraren kontrollerar styrning och hastighet (både acceleration och retardation) hela tiden, utan hjälp alls. Detta inkluderar system som endast ger varningar till föraren utan att vidta några åtgärder.
Nivå 1: Begränsad förarassistans. Detta inkluderar system som kan styra styrning och acceleration/retardation under specifika omständigheter, men inte båda samtidigt.
Nivå 2: Förarassistentsystem som styr både styrning och acceleration/retardation. Dessa system flyttar en del av arbetsbördan bort från den mänskliga föraren, men kräver ändå att personen är uppmärksam hela tiden.
Nivå 3: Fordon som kan köra sig själva i vissa situationer, till exempel i tät trafik på delade motorvägar. Mänskligt ingripande behövs inte när det autonoma läget är inkopplat, utan föraren måste vara redo att ta över när fordonet stöter på en situation som överskrider dess gränser.
Nivå 4: Fordon som kan köra själva för det mesta, men som kan behöva en mänsklig förare för att ta över i vissa situationer.
Nivå 5: Helt autonom. Nivå 5-fordon kan köra sig själva hela tiden, under alla omständigheter. De har inget behov av manuella kontroller.
Redaktörens rekommendationer
- Volkswagen lanserar sitt eget självkörande biltestprogram i USA.
- Autonoma bilar förvirrade av San Franciscos dimma
- Lyser din kontrollmotorlampa? Här är 10 möjliga orsaker
- De bästa iPhone-bilfästena 2023: topp 10 bästa du kan köpa
- Teslas begagnade bilmarknad är inte längre lika lukrativ, visar data



