A teraz, miesiąc później, wiemy dlaczego. Według Europejskiej Agencji Kosmicznej do awaryjnego lądowania doszło po ok komputer błędnie ocenił wysokość statku kosmicznegopowodując, że lądownik poleci bezpośrednio na Marsa z prędkością 535 mil na godzinę. ESA zauważyła, że oprogramowanie komputerowe statku kosmicznego doprowadziło ją do przekonania, że jest ona niższa niż w rzeczywistości, w związku z czym wcześniej niż było to konieczne uruchomiła spadochron i silniki hamujące.
Polecane filmy
„Błędne informacje spowodowały, że szacunkowa wysokość była ujemna, czyli poniżej poziomu gruntu” – stwierdziła ESA w oświadczeniu. „To z kolei spowodowało przedwczesne zwolnienie spadochronu i tylnej skorupy [osłony termicznej], krótko uruchomienie silników hamujących i wreszcie uruchomienie systemów naziemnych, tak jakby Schiaparelli już to zrobił wylądował. W rzeczywistości pojazd nadal znajdował się na wysokości około 3,7 km (2,3 mil).”
Powiązany
- Należący do NASA dron marsjański robi fajne zdjęcia podwozia łazika
- Przeżyj jeszcze raz niezwykłe lądowanie łazika marsjańskiego NASA po roku
- Obejrzyj, jak Europejska Agencja Kosmiczna testuje spadochron swojego nowego łazika marsjańskiego
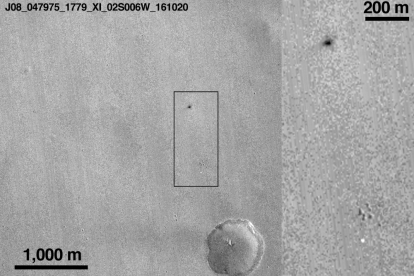
W kilka dni po niefortunnym lądowaniu ExoMarsa NASA gromadziła i analizowanie zdjęć powierzchni wykonanych przez sondę Mars Reconnaissance Orbiter przy użyciu aparatu CTX o niskiej rozdzielczości kamera. NASA współpracowała z ESA przy rejestrowaniu opadania lądownika w ramach planowanej misji. Uważa się, że obrazy przedstawiają wejście, zejście na spadochronie i późniejsze lądowanie statku kosmicznego. Ostateczne zdjęcia przedstawiają szeroką, ciemną plamę o wymiarach około 50 na 130 stóp, która, jak się uważa, pokazuje uderzenie i możliwe zniszczenie modułu Schiaparelliego podczas lądowania.
Niedawne oświadczenie ESA potwierdza wcześniejszą hipotezę, która sugerowała, że moduł rozbił się w wyniku przedwczesnego wyłączenia jego silników odrzutowych. Zamiast płynąć do miękkiego lądowania za pomocą silników odrzutowych, lądownik opadł na głębokość 4,5 mili z prędkością 300 km/h. Gdyby silniki odrzutowe nie działały, moduł wylądowałby awaryjnie z pełnym ładunkiem paliwa. Paliwo eksplodowałoby w wyniku uderzenia, tworząc dużą chmurę gruzu powierzchniowego, którą widać na materiale filmowym MRO.
„W pewnym sensie mamy szczęście, że tę słabość systemu nawigacji odkryto podczas lądowania testowego, przed drugą misją” – powiedział Thierry Blancquaert, menadżer Schiaparelli w ESA.
„To wciąż bardzo wstępny wniosek” – dodał David Parker, dyrektor ESA ds. lotów kosmicznych i eksploracji robotycznej w ESA. „Pełny obraz zostanie przedstawiony na początku 2017 r. w przyszłym raporcie zewnętrznej niezależnej komisji dochodzeniowej”.
„Ale od Schiaparelliego nauczymy się wiele, co bezpośrednio przyczyni się do opracowania drugiej misji ExoMars wraz z naszymi międzynarodowymi partnerami i jej wystrzelenia w 2020 roku”.
Artykuł pierwotnie opublikowany w październiku. Zaktualizowano 24.11.2016 przez Lulu Chang: Dodano wiadomość o przyczynach katastrofy lądownika ExoMars.
Zalecenia redaktorów
- Lądownik InSight NASA wykrył „potworne trzęsienie ziemi” na Marsie
- Europejska Agencja Kosmiczna zawiesza wspólną misję na Marsa z Rosją
- Dlaczego NASA zamierza zerwać kontakt ze swoimi badaczami Marsa
- Zobacz, jak Europejska Agencja Kosmiczna testuje spadochron łazika marsjańskiego
- Helikopter NASA Ingenuity podczas ósmego lotu na Marsa przelatuje 160 metrów
Ulepsz swój styl życiaDigital Trends pomaga czytelnikom śledzić szybko rozwijający się świat technologii dzięki najnowszym wiadomościom, zabawnym recenzjom produktów, wnikliwym artykułom redakcyjnym i jedynym w swoim rodzaju zajawkom.


