NASA wil de hulp van het publiek bij het in kaart brengen van het oppervlak van Mars, om uiteindelijk te helpen rijdende rovers te maken Nieuwsgierigheid rond de rode planeet een beetje gemakkelijker.
NASA heeft een algoritme genaamd SPOC (Soil Property and Object Classification), dat verschillende soorten objecten labelt Mars-terrein zoals rotsblokken of zand om kaarten te maken die de roverbestuurder kan gebruiken bij het manoeuvreren voertuigen. Maar het systeem moet worden verfijnd en daarvoor moet een enorme hoeveelheid gegevens worden ingevoerd.
Aanbevolen video's
“Normaal gesproken zijn er honderdduizenden voorbeelden nodig om een deep learning-algoritme te trainen”, zegt Hiro Ono, een A.I. onderzoeker bij het Jet Propulsion Laboratory van NASA, zei in een stelling. “Algoritmen voor zelfrijdende auto’s worden bijvoorbeeld getraind met talloze afbeeldingen van wegen, borden, verkeerslichten, voetgangers en andere voertuigen. Andere openbare datasets voor deep learning bevatten mensen, dieren en gebouwen – maar geen marslandschappen.”
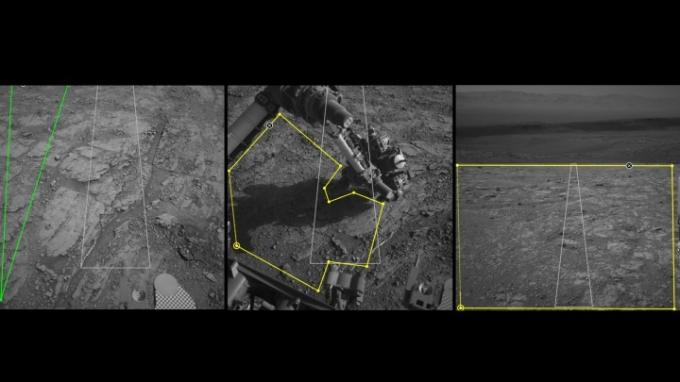
Om te helpen bij het trainen van het algoritme, nodigt NASA het publiek uit om stukjes marsterrein te helpen classificeren. Het publiek kan gebruik maken van de AI4Mars hulpmiddel om grenzen rond objecten in het terrein te tekenen en deze te labelen als zand, aarde, gesteente of grote rotsen. Dit zal SPOC helpen onderscheid te maken tussen verschillende delen van het terrein, wat kan worden gebruikt bij toekomstige rovernavigatie.
“We hopen dat dit algoritme in de toekomst nauwkeurig genoeg kan worden om andere nuttige taken uit te voeren, zoals voorspellen hoe waarschijnlijk het is dat de wielen van een rover op verschillende oppervlakken gaan slippen”, zegt Ono.
Het idee is niet om menselijke chauffeurs te vervangen door SPOC, aangezien mensen nog steeds absoluut nodig zijn voor de uiterst complexe taak om een rover rond een andere planeet te navigeren. Maar het algoritme kan hen helpen met enkele van de saaiere delen van hun werk, waardoor ze zich kunnen concentreren op meer wetenschappelijk interessante taken.
“Het is onze taak om erachter te komen hoe we de wetenschap van de missie veilig kunnen verkrijgen”, zegt Stephanie Oij, een van de roverplanners van het laboratorium die betrokken is bij AI4Mars. “Het automatisch genereren van terreinlabels zou ons tijd besparen en ons helpen productiever te zijn.”
Je kunt beginnen met het labelen van terrein en het helpen van de roverchauffeurs op het terrein AI4Mars-website.
Aanbevelingen van de redactie
- Perseverance rover vindt organische moleculen in de Jezero-krater op Mars
- NASA-vrijwilligers zullen een heel jaar in een gesimuleerde Mars-habitat leven
- NASA verloor een week lang het contact met de Mars Ingenuity-helikopter, maar nu is alles in orde
- Perseverance-rover vindt bewijs van een oude rivier op Mars
- NASA bereidt zich voor op zijn tweede volledig privémissie naar het ISS
Upgrade uw levensstijlMet Digital Trends kunnen lezers de snelle technische wereld in de gaten houden met het laatste nieuws, leuke productrecensies, inzichtelijke redactionele artikelen en unieke sneak peeks.


