Autonomās automašīnas 2010. gados bija nedaudz vairāk par Holivudas sapni, un tās kļuva par realitāti, galvenokārt pateicoties tādu tehnoloģiju uzņēmumu kā Google veiktajiem pētījumiem. Lai gan tie vēl nav saplūduši galvenajā straumē un jūs to nevarat iegādāties jau rakstot, pašbraucošie prototipi katru gadu nobrauc miljoniem jūdžu pa mūsu valsts ceļiem.
Saturs
- Sākas sapnis bez vadītāja
- Džona Makartija robo-šoferis
- Nav roku pāri Amerikai
- Grand Challenge ir pārāk izaicinošs
- Autostāvvieta kļūst gudrāka
- Google meklē atbildi
- Lielie automašīnu ražotāji ienirst
- Pirmā autonomās automašīnas bojāeja
- A.I. nāk uz pašbraucošām automašīnām
- Ko tālāk?
- Paskaidroti autonomijas līmeņi
Nav viegli saspiest pašbraucošo automašīnu vēsturi mazāk nekā 10 pavērsienos, taču mēs esam darījuši visu iespējamo.
Ieteiktie videoklipi
Sākas sapnis bez vadītāja
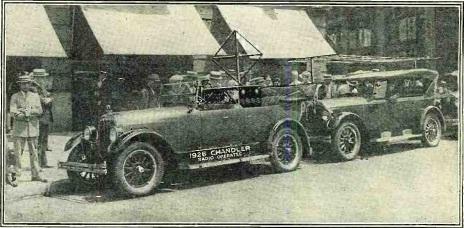
Nepagāja ilgs laiks pēc automašīnas dzimšanas, līdz izgudrotāji sāka domāt par autonomiem transportlīdzekļiem. 1925. gadā izgudrotājs Frensiss Houdina demonstrēts
radio vadāma automašīna, ar kuru viņš brauca pa Manhetenas ielām, nevienam pie stūres nesēdot. Saskaņā ar New York Times periodisko ziņojumu, radiovadāmais transportlīdzeklis varēja iedarbināt dzinēju, pārslēgt pārnesumus un skaņas signālu "it kā fantoma roka būtu pie stūres".Interesanti, ka Houdina vārds izklausījās pietiekami līdzīgs slavenā bēgšanas mākslinieka un iluzionista Harija Hudīni vārdam, ka daudzi cilvēki domāja, ka tas ir Hudīni jaunākais triks. Hudīni apmeklēja Houdina kompāniju un nokļuva fiziskā sadursmē, kuras laikā viņš salauza elektrisko lustru.
Džona Makartija robo-šoferis
1969. gadā Džons Makartijs — kurš tiek slavēts kā viens no mākslīgā intelekta pamatlicējiem — esejā ar nosaukumu aprakstīja kaut ko līdzīgu mūsdienu autonomajam transportlīdzeklim.Ar datoru vadāmas automašīnas”. Makartijs atsaucās uz "automātisko šoferi", kas spēj pārvietoties pa koplietošanas ceļu, izmantojot "televīzijas kameras ieeju, kas izmanto to pašu vizuālo ievadi, kas pieejama vadītājam".
Viņš rakstīja, ka lietotājiem vajadzētu būt iespējai ievadīt galamērķi, izmantojot tastatūru, kas pēc tam liks automašīnai nekavējoties viņus tur nogādāt. Papildu komandas ļautu lietotājiem mainīt galamērķi, apstāties tualetē vai restorānā, samazināt ātrumu vai paātrināt avārijas gadījumā. Šāds transportlīdzeklis netika uzbūvēts, taču Makartija esejā bija izklāstīta citu pētnieku misija, kuras virzienā strādāt.
Nav roku pāri Amerikai
Neironu tīkla autonomā vadīšana
90. gadu sākumā Kārnegijs Melons pētnieks Dīns Pomerlo uzrakstīja doktora grādu. diplomdarbs, kurā aprakstīts, kā neironu tīkli varētu ļaut pašbraucošam transportlīdzeklim uzņemt neapstrādātus attēlus no ceļa un izvadīt stūres vadības ierīces reāllaikā. Pomerleau nebija vienīgais pētnieks, kurš strādāja pie pašbraucošām automašīnām, taču viņa neironu tīklu izmantošana izrādījās veiksmīga efektīvāk nekā alternatīvi mēģinājumi manuāli sadalīt attēlus kategorijās "ceļš" un "neceļš".
1995. gadā Pomerleau un kolēģis pētnieks Tods Johems paņēma savu Navlab pašbraucošo automašīnu sistēmu uz ceļa. Viņu kailkauli autonomais minivens (viņiem bija jākontrolē ātrums un bremzēšana) no Pitsburgas līdz Sandjego nobrauca 2797 jūdzes no krasta līdz krastam ceļojumā, ko pāri nodēvēja par “No Hands Across America”.
Grand Challenge ir pārāk izaicinošs
DARPA paziņoja par savu pirmo Lielo izaicinājumu 2002. gadā. Tas piedāvāja zinātniekiem no vadošajām pētniecības iestādēm 1 miljonu ASV dolāru, ja viņi varētu uzbūvēt autonomu transportlīdzekli, kas spētu pārvietoties 142 jūdžu garumā cauri Mohaves tuksnesim.
Izaicinājums notika 2004. Neviens no 15 dalībniekiem nevarēja pabeigt kursu. "Uzvarošais" ieraksts vairāku stundu laikā nobrauca mazāk nekā 8 jūdzes, pirms aizdegās. Tas bija postošs trieciens mērķim izveidot īstas pašbraucošas automašīnas; pēc tam, kad ziņas par ugunsgrēku parādījās virsrakstos, daudzi uzskatīja, ka nav iespējams sasniegt pilnīgu autonomiju.
Autostāvvieta kļūst gudrāka
Audi Piloted Parking (Audi pašapkalpošanās autostāvvieta)
Lai gan 2000. gados autonomie transportlīdzekļi joprojām izskatījās pēc zinātniskās fantastikas, pašapkalpošanās parkošanās sistēmas sāka parādīties kā standarta vai papildu aprīkojums (un galvenokārt luksusa automašīnās). Viņi pierādīja, ka sensori bija tuvu tam, lai varētu tikt galā ar salīdzinoši sarežģītiem reālās pasaules apstākļiem, piemēram, paralēli novietot automašīnu šaurā vietā.
Toyota hibrīdauto Prius 2003. gadā piedāvāja automātisko paralēlās stāvēšanas palīdzību, savukārt Lexus drīz vien pievienoja līdzīgu sistēmu. LS, tā vadošais sedans. Ford izlaida Active Park Assist 2009. gadā, bet BMW sekoja gadu vēlāk.
Google meklē atbildi

Google slepeni uzsāka savu pašbraucošo automašīnu projektu 2009. gadā. 2020. gadā pazīstams kā Waymo, un sākotnēji to vadīja Sebastians Thruns, bijušais Stenfordas Mākslīgā intelekta laboratorijas direktors un Google Street View līdzizgudrotājs. Pagāja daži gadi, līdz uzņēmums paziņoja, ka tā prototipi ir kopīgi nobraukuši 300 000 jūdžu datora kontrolē bez neviena negadījuma, kas ir iespaidīgs varoņdarbs, kas pieķēra daudzus negadījumus.
2014. gadā tas atklāja autonomu prototipu bez stūres, gāzes pedāļa vai bremžu pedāļa; tas bija 100% autonoms. Waymo tiek plaši slavēts kā neapstrīdams līderis pašbraukšanas tehnoloģijā.
Lielie automašīnu ražotāji ienirst

Līdz 2013. gadam automašīnu uzņēmumi, tostarp General Motors, Ford, Mercedes-Benz un BMW strādāja pie savām pašpiedziņas tehnoloģijām. Patiesu autonomiju izrādījās grūtāk sasniegt, nekā daudzi domāja gan no tehniskā, gan juridiskā viedokļa, un 2010. gados patērētājiem pieejamā tehnoloģija labākajā gadījumā bija daļēji automatizēta.
Pirmā autonomās automašīnas bojāeja

Apgalvojumi, ka pašbraukšanas tehnoloģija ir drošāka nekā autovadītāji, tika apšaubīti, kad viens no Uber Volvo XC90 prototipiem notrieca un nogalināja 49 gadus veco Elīnu Hercbergu kad viņa šķērsoja ielu Arizonā. Lai gan viņa staigāja ar kājām, avārija tika uzskatīta par pilnībā novēršamu. Policijas darbinieki secināja, ka Uber drošības šoferis (kuram ir jāpārņem vadību avārijas gadījumā) vēro Hulu līdz pussekundei pirms trieciena.
A.I. nāk uz pašbraucošām automašīnām

Plkst CES 2018, Nvidia atklāja jaunu pašpiedziņas automašīnas mikroshēmu ar nosaukumu Ksavjers, kas ietver mākslīgo intelektu. Pēc tam uzņēmums paziņoja, ka tā ir sadarbojoties ar Volkswagen izstrādāt A.I. nākotnes pašbraucošām automašīnām. Lai gan tas nav pirmais mēģinājums piesātināt autonomās automašīnas ar A.I. (Toyota jau pētīja koncepciju ar MIT un Stanford), Volkswagen un Nvidia sadarbība ir pirmā, kas savieno A.I. līdz ražošanai aparatūra. Tas paver iespēju pašbraucošām automašīnām uzlabot veiktspēju, kā arī jaunas ērtības, piemēram, digitālos palīgus.
Ko tālāk?
2020. gadā lielākā daļa autoražotāju ir atvēsinājuši savas pašpiedziņas automobiļu ambīcijas un izmantojuši daudz reālistiskāku pieeju šīs tehnoloģijas attīstībai. Nav nevienas autonomas automašīnas, ko plaša sabiedrība varētu iegādāties, taču daži uzņēmumi domā, ka ir tuvu koda uzlaušanai. Uz spēles ir likti miljardi dolāru un apskaužams monopols.
Tesla pārdod opciju paketi ar nosaukumu Full Self-Driving, taču tās automašīnas nav autonomas ar jebkādiem mērīšanas līdzekļiem; Vācijas valdība īpaši lūdza pārtraukt lietot šo terminu. Volkswagen ir izstrādāt tehnoloģiju iekšēji, un tas apņēmās izvietot retro autonomie furgoni 2022. gada Pasaules kausa izcīņas laikā. Un vācu piegādātājs Bosch apvienoja spēkus ar Mercedes-Benz mātesuzņēmumu Daimler, lai Sanhosē ielās ieviestu autonomus S-klases prototipus. Citas partnerības, projekti, panākumi un neveiksmes neapšaubāmi parādīsies 2020. gadu sākumā.
Paskaidroti autonomijas līmeņi
Lai gan termini “pašbraucošs” un “autonoms” tiek plaši izplatīti, ne visiem transportlīdzekļiem ir vienādas iespējas. The SAE autonomijas skala tiek izmantots, lai noteiktu dažādus autonomo spēju līmeņus. Šeit ir sadalījums.
0. līmenis: Nav automatizācijas. Vadītājs visu laiku kontrolē stūrēšanu un ātrumu (gan paātrinājumu, gan palēninājumu) bez jebkādas palīdzības. Tas ietver sistēmas, kas tikai brīdina vadītāju, neveicot nekādas darbības.
1. līmenis: Ierobežota palīdzība vadītājam. Tas ietver sistēmas, kas var kontrolēt stūrēšanu un paātrinājumu/palēninājumu noteiktos apstākļos, bet ne abus vienlaikus.
2. līmenis: Vadītāja palīgsistēmas, kas kontrolē gan stūrēšanu, gan paātrinājumu/palēninājumu. Šīs sistēmas novirza daļu no darba slodzes prom no cilvēka vadītāja, taču joprojām prasa, lai šī persona vienmēr būtu uzmanīga.
3. līmenis: Transportlīdzekļi, kas noteiktās situācijās var braukt paši, piemēram, blīvā satiksmē uz sadalītām maģistrālēm. Cilvēka iejaukšanās nav nepieciešama, ja ir ieslēgts autonomais režīms, bet vadītājam ir jābūt gatavam pārņemt vadību, kad transportlīdzeklis saskaras ar situāciju, kas pārsniedz tā robežas.
4. līmenis: Transportlīdzekļi, kas lielāko daļu laika var vadīt paši, bet dažās situācijās var būt nepieciešams vadītājs cilvēks.
5. līmenis: Pilnībā autonoms. 5. līmeņa transportlīdzekļi var braukt paši jebkurā laikā un jebkuros apstākļos. Viņiem nav nepieciešama manuāla vadība.
Redaktoru ieteikumi
- Volkswagen sāk savu pašbraucošo automašīnu testēšanas programmu ASV.
- Sanfrancisko miglas mulsinātas autonomas automašīnas
- Vai jūsu kontrolmotora indikators ir ieslēgts? Šeit ir 10 iespējamie iemesli
- Labākie iPhone automašīnu stiprinājumi 2023. gadā: 10 labākie, ko varat iegādāties
- Tesla lietoto automašīnu tirgus vairs nav tik ienesīgs, liecina dati



