국제 우주 정거장(ISS)에 있는 두 명의 우주 유영자가 4월 28일 목요일에 처음으로 시설의 새로운 로봇 팔을 활성화했습니다.
러시아 우주 비행사 올렉 아르테미예프(Oleg Artemyev)와 데니스 마트베예프(Denis Matveev)는 오후 6시 40분에 우주 유영을 마쳤습니다. 동부 표준시 7시 이후 ISS 밖에서 1시간 42분(유럽 로봇 팔 작업에 많은 시간 소요) (연대).
추천 동영상
시대 작년 7월에 역에 도착했어요 하지만 목요일까지 보온 담요로 덮여 있었습니다.
관련된
- 우주 비행사들이 국제 우주 정거장에 다섯 번째 새로운 태양 전지판을 설치했습니다.
- 우주정거장이 또 붐비고 있어
- 4명의 우주정거장 우주비행사가 크루 드래곤(Crew Dragon)을 '회전'으로 데려갔습니다.
NASA는 지구 상공 약 250마일 상공에서 두 명의 우주비행사가 첫 번째 훈련을 앞두고 로봇 팔을 구속에서 풀기 위해 노력하는 장면(아래)을 공유했습니다.
스테이션의 새로운 로봇 팔 @ESA Nauka 모듈의 구속이 해제되어 이제 작동 중입니다. https://t.co/yuOTrYN8CVpic.twitter.com/5h7PHORXuM
— 국제 우주 정거장(@Space_Station) 2022년 4월 28일
이 단계에 도달하는 데 오랜 시간이 걸렸습니다. ERA는 30여년 전에 설계되었으며 지난 20년 동안의 다양한 기술적 문제로 인해 ISS에 대한 세 가지 계획된 임무가 실패했습니다.
그러나 이제 유럽우주국(ESA) 엔지니어들은 마침내 우주에서 팔의 첫 번째 활성화를 축하할 수 있게 되었습니다.
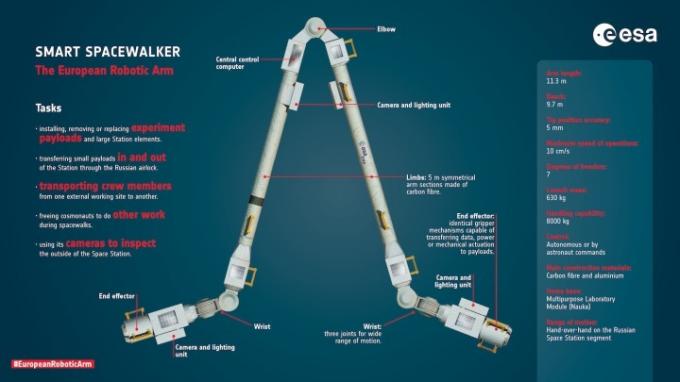
새로운 로봇 팔은 길이가 약 11미터, 무게가 630킬로그램(1,390파운드)이며 높은 수준의 기동성을 제공하는 7개의 관절을 포함합니다.
ERA는 주로 실험 페이로드 및 대형 구성 요소를 설치, 제거 및 교체하는 데 사용됩니다. 러시아 에어록을 통해 스테이션 안팎으로 더 작은 페이로드를 전송합니다. ISS의 한 부분에서 "체리 따기 크레인처럼" 다른 부분으로 우주 유영자를 수송합니다. 4대의 카메라를 사용해 우주정거장 외부를 모니터링하고 검사합니다.
우주정거장에는 이미 캐나다의 Canadarm2와 일본의 실험 모듈 원격 조종 시스템(Remote Manipulator System)이라는 두 개의 작동 가능한 로봇 팔이 있지만 ERA는 최초로 ISS의 러시아 구역 외부에 배치되므로 우주 유영자들이 외부에서 유지 관리 및 업그레이드 작업을 수행할 때 더 넓은 범위를 확보할 수 있습니다. 시설.
ESA에 따르면 "스마트 우주유영자"라고 불리는 이 새로운 팔은 고정된 베이스 포인트 사이에서 손을 잡고 움직일 수 있기 때문에 "걷기 위해 만들어졌다"고 합니다.
“유럽 로봇 팔은 역의 러시아 지역을 손으로 움직이며 더 많은 것을 가져올 것입니다. 우주 작전에 대한 자유, 더 많은 유연성, 더 많은 기술을 제공합니다.”라고 기관은 새로운 ISS에 대해 말했습니다. 요소.
ERA를 완전히 작동시키려면 총 5번의 우주 유영이 필요합니다. 그 중 첫 번째 작업은 지난 주에 진행되었으며 제어판 설치와 관련이 있었습니다. 목요일은 우주에서 처음으로 팔을 움직이는 두 번째였으며, 세 번째 우주 유영은 현재 5월로 예정되어 있습니다.
편집자의 추천
- NASA의 새로운 태양 전지판이 우주 정거장에서 펼쳐지는 모습을 지켜보세요
- 지구 궤도의 승무원에 대한 새로운 우주 기록 수립
- NASA의 개인 임무가 우주 정거장에 도착하는 것을 보는 방법
- Airbus의 멋진 우주정거장 디자인을 확인해 보세요.
- NASA와 보잉이 최초로 유인 스타라이너 비행의 새로운 날짜를 공개했습니다.
당신의 라이프스타일을 업그레이드하세요Digital Trends는 독자들이 모든 최신 뉴스, 재미있는 제품 리뷰, 통찰력 있는 사설 및 독특한 미리보기를 통해 빠르게 변화하는 기술 세계를 계속 확인할 수 있도록 도와줍니다.


