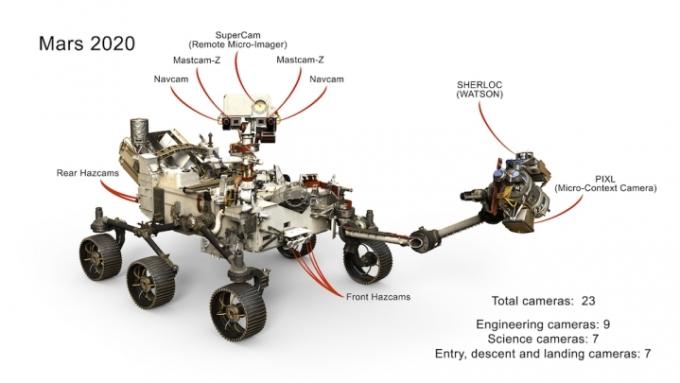
NASA의 최신 화성 탐사선인 Perseverance는 현재까지 가장 발전된 탐사선으로 23대의 카메라 제품군을 포함하는 수많은 기술을 탑재하고 있습니다.
내용물
- 착륙 카메라
- 엔지니어링 카메라
- 과학 카메라
우리는 이미 놀라운 영상을 접하다 2021년 2월 18일 탐사선이 화성 표면에 접근하는 동안 여러 대의 카메라에서 포착한 모습입니다. 내부 착륙 지점에 도착 후 몇 분 이내 제제로 분화구, Perseverance는 또한 여러 장의 스틸 이미지를 지구로 다시 전송했으며 며칠 후 새로운 주변 환경을 놀랍도록 자세하게 보여주는 최초의 고품질 사진을 전송했습니다.
추천 동영상
카메라가 로버의 2년 임무에서 핵심적인 역할을 하도록 설정되었기 때문에 우리는 탐사선에 대해 좀 더 알아보는 것이 좋은 아이디어라고 생각했습니다. 각 장치 뒤에 숨겨진 기술과 Perseverance가 과거의 흔적을 찾기 위해 먼 행성을 탐험하기 시작하면서 우리가 기대할 수 있는 것 삶.
관련된
- 큐리오시티 탐사선이 촬영하는 데 4일이 걸린 이 18억 픽셀 화성 사진
착륙 카메라
주요 역할: 탐사선이 화성 대기를 통과하는 동안 위쪽과 아래쪽의 이미지를 캡처합니다.

Perseverance를 운반하는 우주선은 화성 표면으로의 위태로운 하강을 포착하기 위해 4개 이상의 고화질 카메라를 사용했습니다. 영상(아래)은 NASA가 현재까지 5개 화성 착륙 중 최고의 영상을 쉽게 제공했으며, 카메라는 가능한 한 많은 탑승 장면을 포착하도록 세심하게 배치되었습니다.
그리고 그 영상은 단지 우주 팬들을 놀라게 하기 위한 목적이 아니었습니다. 또한 엔지니어들에게 착륙 시스템의 작동 방식에 대한 정확한 정보를 제공하여 향후 화성 임무를 위해 더 나은 우주선을 설계하는 데 도움이 될 것입니다.
Perseverance Rover의 화성 하강 및 착륙(공식 NASA 비디오)
낙하산 "상향" 카메라
이것은 우주선의 백쉘에 장착되었으며 낙하산 배치 및 팽창을 포착하기 위해 위쪽을 향했습니다. 영상을 통해 엔지니어들은 얇은 화성 환경에서 낙하산이 어떻게 작동하는지 처음으로 볼 수 있었고 이를 통해 향후 임무를 위한 설계를 향상할 수 있었습니다.
하강 단계 "다운룩(down-look)" 카메라
우주선의 하강 스테이지에 위치한 이 카메라는 케이블로 내려가는 탐사선의 영상을 포착하기 위해 아래를 향하고 있습니다. 그러나 마지막 순간에 차량은 하강 단계에서 발생하는 먼지로 인해 가려졌습니다. 추진기.
로버 "상향" 카메라
로버의 갑판에 고정된 이 상향 카메라는 착륙 전 중요한 마지막 순간 동안 하강 단계를 포착했습니다. 다시 한 번 말씀드리지만, 이 모든 영상은 미래의 화성 우주선을 설계하는 엔지니어들에게 유용할 것입니다. 우주선 중 하나는 최초의 우주비행사를 화성으로 데려갈 것입니다.
로버 "다운룩" 카메라
이 카메라는 로버 아래에 장착되어 지상을 똑바로 향했습니다. 차량이 착륙할 때 먼지가 많은 표면에 하강 단계의 추진기가 미치는 영향을 기록했습니다.
엔지니어링 카메라
Perseverance는 NASA의 다섯 번째 화성 탐사선이자 지금까지 가장 영리한 탐사선입니다. 새 키트에는 스캔을 수행하는 차세대 엔지니어링 카메라(HazCam/NavCam/CacheCam)가 포함되어 있습니다. 위험 지역을 파악하고, 로버의 하드웨어 상태를 모니터링하고, 샘플 수집을 지원합니다. 향상된 엔지니어링 카메라는 동일한 카메라 본체 디자인을 가지고 있지만 각 카메라에는 고유한 작업을 위해 특별히 설계된 서로 다른 렌즈가 있습니다.
HazCam(위험 카메라)
주요 역할: 자율 항법 지원
2021년 2월 화성에 극적인 착륙을 한 후 Perseverance에서 첫 번째 이미지(아래)를 전송한 것은 탐사선의 6개 HazCam 중 하나였습니다. 그 순간도 포착됐다. 하강 단계에서 제어된 충돌 착륙이 수행되었습니다. Perseverance를 화성 표면에 전달한 직후.

화성이 AAA 범위를 약간 벗어나 있는 상황에서 NASA가 마지막으로 필요로 하는 것은 Perseverance가 모래 언덕에 갇히거나 바위로 운전하는 것입니다. HazCam이 등장하는 곳이 바로 여기입니다. 전면에 4개, 후면에 2개가 있는 이 카메라는 탐사선이 화성 표면을 가로질러 이동할 때 탐사선의 경로에 나타나는 장애물을 지속적으로 찾아냅니다.
컴퓨터 소프트웨어는 HazCam의 3D 이미지를 자동으로 분석한 다음 이 정보를 사용하여 어디로 가야할지 자율적으로 결정합니다. 이러한 자율 주행 스마트 덕분에 Perseverance는 팀 구성원과 지속적으로 다시 상담할 필요 없이 계속 진행할 수 있습니다. 지구이지만 탐사 과정에서 탐사선의 주요 이동 방향을 궁극적으로 결정하는 것은 팀입니다. 사명.
HazCam은 측정 및 사진 촬영 시 엔지니어가 Perseverance의 로봇 팔을 이동할 위치를 결정하는 데 도움을 줌으로써 또 다른 중요한 역할을 수행합니다.
NavCam(내비게이션 카메라)
주요 역할: 자율 항법 지원
NASA의 Perseverance Rover의 최초의 화성 360도 뷰(공식)
Perseverance에는 두 가지 컬러 스테레오 내비게이션 카메라(NavCam)가 있습니다. 이들은 로버의 중앙 마스트 상단에 약 42cm(16.5인치) 간격으로 위치하며 차량의 자율 주행을 돕는 장비의 일부입니다. NASA에 따르면 NavCam은 25미터(82피트) 떨어진 곳에서 골프공만큼 작은 물체를 탐지할 수 있을 만큼 발전했습니다. 그들은 또한 위의 화성 탐사에서 불과 며칠 만에 포착한 것과 같은 꽤 멋진 파노라마 사진을 제공하고 있습니다.
캐시캠
주요 역할: 수집된 암석 샘플을 샘플 튜브 안에 넣은 후 상세한 이미지를 촬영합니다.

CacheCam은 샘플 캐시 상단의 탐사선 아랫부분 내부에 위치합니다. 암석과 토양의 사진을 찍는 데 사용됩니다. 샘플 튜브 내부에 배치 탐사 중 Perseverance에 의해 일부 물질이 향후 임무 중에 지구로 다시 가져올 가능성이 있습니다. CacheCam을 사용하면 과학자들은 화성 표면에서 수집하는 물질의 유형을 기록할 수도 있습니다.
과학 카메라
Perseverance의 고급 과학 카메라에는 Mastcam-Z, SuperCam, PIXL, SHERLOC 및 Watson이 포함됩니다. 각각은 화성에 한때 생명체가 존재했는지 확인하는 데 도움이 될 수 있는 중요한 작업을 수행하도록 설계되었습니다.
마스트캠-Z
주요 역할: 화성 표면과 대기의 특징을 고화질 영상, 파노라마 컬러 사진, 3D 이미지로 촬영
마스트캠-Z 주변의 360도 보기를 제공하는 두 대의 카메라(NavCam 사이에 위치)로 구성됩니다. 또한 확대/축소 기능도 포함되어 있습니다(예, "Z"는 확대/축소를 나타냅니다.). 스마트 폰 카메라. 실제로 NASA에 따르면 Mastcam-Z는 "축구장 길이 정도의 거리에서 집파리만큼 작은 특징을 볼 수 있습니다."
Mastcam-Z로 촬영한 142장의 개별 사진으로 구성된 아래 이미지는 Mastcam-Z의 인상적인 성능을 잘 보여줍니다. 더 자세한 내용을 보려면 "+" 버튼을 눌러 확대하거나 여기 이미지를 전체 화면으로 찍으려면
이와 같은 놀라운 기술을 통해 Mastcam-Z는 과학자들이 NASA의 전생 증거 검색에서 추가 조사가 필요한 영역을 결정하는 데 도움을 줄 수 있습니다.
슈퍼캠
주요 역할: 원자 및 분자 구성을 포함하여 암석과 토양의 화학적 구성을 식별합니다.
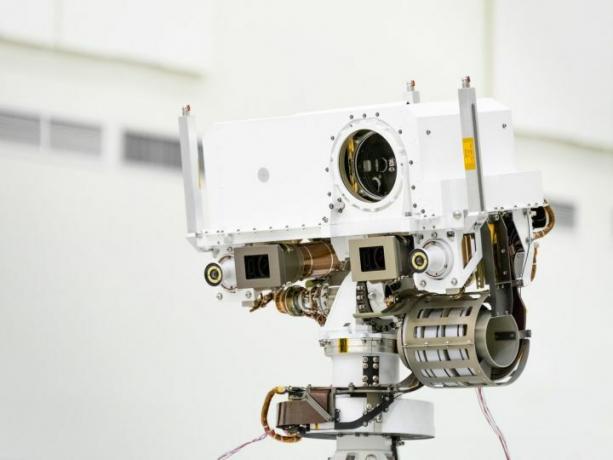
이름에 걸맞게 SuperCam은 Perseverance의 마스트 꼭대기에 장착되어 있으며 매우 인상적인 스마트 기능을 갖추고 있습니다. 우선, 레이저를 발사할 수 있지만 다행히도 우리가 만날 수 있는 화성인을 겨냥하지는 않습니다. 대신 레이저는 탐사선의 로봇 팔이 도달할 수 없는 광물 표적에 초점을 맞춥니다.
약 7미터(20피트) 거리에서 암석의 작은 영역에 발사하면 레이저가 자유롭게 떠다니는 이온과 전자로 구성된 뜨거운 가스를 형성하게 됩니다. 그런 다음 SuperCam은 기화된 암석을 분석하여 원소 구성을 알아냅니다. 이 절차는 화성의 과거 생명체와 연결될 수 있는 유기 화합물을 발견할 가능성이 있습니다.
PIXL(X선 리소화학을 위한 행성 장비)
주요 역할: 매우 미세한 규모로 암석의 화학적 구성을 측정합니다.
PIXL은 로버의 로봇 팔 끝 부분에서 발견되며 엑스레이를 사용하여 NASA가 식용 소금 알갱이만큼 작을 수 있다고 말하는 목표 지점의 화학 원소를 식별합니다. PIXL에는 요소 구성 맵과 대상 영역의 가시적 특성을 연관시키는 데 도움이 되는 이미지를 제공하는 Micro-Context Camera가 포함되어 있습니다.
SHERLOC(유기물 및 화학 물질에 대한 라만 및 발광을 사용한 거주 가능 환경 스캐닝)
주요 역할: 미네랄, 유기 분자 및 잠재적 생체특징의 미세 규모 검출

Perseverance의 로봇 팔 끝에도 위치한 SHERLOC에는 카메라, 분광계 및 레이저가 통합되어 있습니다. 이 장치는 과거 미생물 생활의 흔적을 검색하면서 물이 많은 환경에 의해 변경된 유기물과 미네랄을 찾고 있습니다. SHERLOC은 또한 다음과 같은 분야에서 중요한 역할을 하고 있습니다. 인류 최초의 화성 임무를 위한 새로운 우주복 연구.
WATSON(운영 및 엔지니어링을 위한 광각 지형 센서)
주요 역할: 바위 질감을 클로즈업하여 촬영합니다.
SHERLOC 및 WATSON과 같은 이름을 사용하면 화성 임무 중에 이 두 카메라가 함께 작동하는지 알아내기 위해 매우 탐정이 될 필요는 없습니다.
SHERLOC과 마찬가지로 WATSON도 탐사선의 로봇 팔 끝에 있습니다. 컬러 카메라는 과학자들에게 화성 암석의 질감과 구조에 대한 데이터를 제공하도록 설계되었습니다. “WATSON은 SHERLOC이 수집하는 매우 상세한 이미지와 지도에서 규모를 연결하는 이미지를 캡처합니다. 화성의 광물과 유기물부터 SuperCam과 Mastcam-Z가 돛대에서 관찰하는 더 넓은 규모까지,” NASA 말했다.
탐사선에 수많은 카메라와 기타 과학 장비를 탑재한 Perseverance는 2년 간의 임무 동안 화성 표면을 탐험하면서 몇 가지 흥미로운 발견을 할 것이 확실합니다. 따라서 업데이트를 다시 확인하세요.
편집자의 추천
- 새로운 Perseverance 파노라마를 사용하면 확대하여 놀라운 세부 정보를 볼 수 있습니다.



