長い距離を走りたいと思っていて、世界最高の短距離走者を自由に使える場合、彼らを互いに走らせたり、リレーで協力させたりしますか? 本質的にはそれが問題なのです エリオット・ラウズ生物医学工学者であり、ミシガン大学アナーバー校のニューロバイオニクス研究室の所長でもある彼は、数年間最高の課題と取り組んできました。
コンテンツ
- コラボレーションの促進
- バイオニックレッグが登場
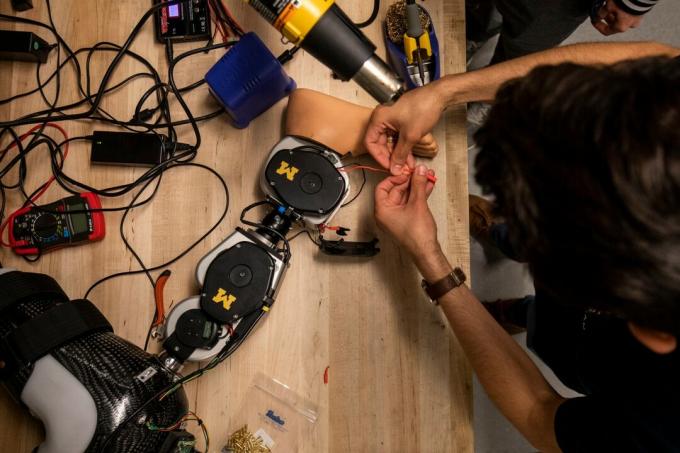
エンジニアのラウズは、バイオニック脚の制御システムの開発に取り組んでいる多くのエンジニアのうちの 1 人です。 人工四肢 着用者からのさまざまな信号を使用して、生物学的な手足のように動作し、動きます。
オープンソースのバイオニックレッグは義足の急速な進歩を目指す
「おそらく、ロボットの脚を作成する際の最大の課題は、ロボットに何をすべきかを指示するコントローラーが関与していることです」とラウズ氏はデジタルトレンドに語った。 「着用者が一歩を踏み出すたびに、一歩を開始する必要があります。 そして、スイッチが切り替わると、脚はアクティビティが変化したことを認識し、その異なるアクティビティに対応するように動く必要があります。 一歩間違えば、階段から落ちたりするなど、大怪我をする可能性があります。 世界中にこれらの制御の課題を研究している才能ある人々がいます。 彼らは何年もの時間と数十万ドルを投資してロボットの脚を構築しています。 この分野が始まって以来、ずっとそうなのです。」
関連している
- クライムワークスはビルサイズの掃除機を何台も使って大気をきれいにしたいと考えている
コラボレーションの促進
ラウズによれば、それは壊れたシステムだという。 競合するハイテク企業が次のビッグ製品の開発に秘密裏に集中するのは理解できます。 彼らは数十億台を販売し、さらに数千億ドル以上を市場にもたらすことを望んでいます キャップ。 しかし、研究機関が他の大学も解決しているのと同じ問題を解決させることで優秀な頭脳を無駄にしているのは、あまり理解できません。 てか、かつては不倶戴天の敵だった Apple と Google も 賭け金が十分に高い場合は協力する.
おすすめ動画
「学術システムは共同研究を促進するのがあまり得意ではありません」とラウズ氏は認めた。 「教授として、私には連邦政府の資金、発行される助成金、指導する学生などの特定の事柄に基づいて評価される仕事があります。 学術制度が研究室の教員のベンチマークを確立する方法を見ると、コラボレーションは[実際には]あまり重視されていません。」
バイオニック手足の制御システムに関して言えば、問題は、それを開始することさえできるということです。 制御システムを開発するには、世界中の個々の研究機関がまず基礎となるシステムを構築する必要があります。 ハードウェア。 先ほどの例えに戻ると、これは、たとえば Apple と Samsung が競合するスマートフォンを極秘で開発するよりも悪い状況です。 それはむしろ、Apple や Samsung が次世代の設計を始める前に、独自のコンピュータ オペレーティング システムをゼロから構築しなければならないことに似ています。 スマートフォン.
ここがラウズのプロジェクト、 オープンソースレッグ、が登場します。 このプロジェクトの背後にいる研究者たちは、専用ウェブページで次のように説明しています。 義足のハードウェア設計、義足の制御、切断者の生体力学に関する断片化された分野の研究は現在、 サイロ。 各研究者は、制御戦略や生体力学的仮説をテストするための独自のロボット脚システムを開発します。 各研究者が出版物を出版し、知識を深めているため、これは短期的には成功する可能性があります。 しかし、長期的には、この断片的な研究アプローチは、結果が人々の生活に影響を与えることを妨げます。 障害のある個人 — 障害のある人々に真の影響を与えるというこの分野の全面的な失敗が頂点に達する それを動機づけたのです。」
バイオニックレッグが登場
オープンソース レッグは、その名前が示すように、義足制御分野の成長を促進するためのユビキタス ハードウェア システムとなる可能性があるオープンソースのバイオニック レッグです。 設計はシンプル(簡単に組み立てられることを意味します)、ポータブル(軽量で内蔵バッテリーで駆動)、経済的(コストがかかります) 10,000 ドル以上の市販の電動補綴物と比較して、10,000 ドルから 25,000 ドルの間)、拡張性があり、 カスタマイズ可能。 詳細な説明書はオンラインで入手でき、それに従うことができます。また、ラウズ氏と彼の同僚は、自分たちで作成することが不可能な場合には、作成して研究者に発送することもできます。

その過程で、プロジェクトは 3 つの目標の達成を目指します。 1 つ目は、低コスト、高性能、オープンソースのロボット膝および足首システムに使用できる電気機械設計を特定することです。 第二に、切断者の歩行に利益をもたらすために、別々のプロテーゼ制御戦略をどのように組み合わせることができるかを理解すること。 最後に、オープンソース脚プロジェクトは、提案されているオープンソース システムを義足制御の研究ツールとして検証したいと考えています。 これらの研究目標が達成できれば、開発者が期待するような革新的な製品になる可能性があります。
「私の生きているうちに、我々は見ることになるだろう」 神経情報を利用できるバイオニック手足皮質または末梢神経レベルで、全体的な動きを知ることができるのです」とラウズ氏は語った。 「これにより、オンボードセンサーを必要とせずに制御できるようになります。」 この革命はすでに起きている、と彼は語った。 きめ細かい器用な動きにはこれよりも時間がかかる可能性がありますが、それは必ずしも実現するのに何年も先のSFの夢ではありません。
そして、人々が協力する方法を見つけることができれば、はるかに早くここに到達できる可能性があります。
編集者のおすすめ
- 3D プリントが義肢の世界を永遠に変えた方法



