Dulunya hanya sekedar mimpi ala Hollywood, mobil otonom menjadi kenyataan di tahun 2010-an berkat penelitian yang dilakukan oleh perusahaan teknologi seperti Google. Meskipun mereka belum menyatu dengan arus utama dan Anda belum dapat membelinya saat artikel ini ditulis, prototipe mobil self-driving menempuh jarak jutaan mil di jalan-jalan negara kita setiap tahunnya.
Isi
- Impian tanpa pengemudi dimulai
- Sopir robot John McCarthy
- Tidak Ada Tangan di Seluruh Amerika
- Tantangan Besar terlalu menantang
- Parkir menjadi lebih pintar
- Google mencari jawabannya
- Produsen mobil besar terjun ke dalamnya
- Kematian mobil otonom pertama
- A.I. datang ke mobil self-driving
- Apa berikutnya?
- Tingkat otonomi dijelaskan
Mengompresi sejarah mobil self-driving menjadi kurang dari 10 pencapaian tidaklah mudah, namun kami telah melakukan yang terbaik.
Video yang Direkomendasikan
Impian tanpa pengemudi dimulai
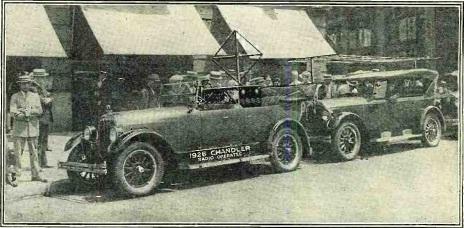
Tidak butuh waktu lama setelah kelahiran mobil bagi para penemu untuk mulai memikirkan kendaraan otonom. Pada tahun 1925, penemu Francis Houdina
didemonstrasikan sebuah mobil yang dikendalikan radio, yang dia kendarai melalui jalanan Manhattan tanpa ada orang yang mengemudikannya. Menurut laporan New York Times, kendaraan yang dikendalikan radio ini mampu menghidupkan mesinnya, memindahkan gigi, dan membunyikan klakson “seolah-olah ada tangan hantu yang mengemudikannya”.Lucunya, nama Houdina terdengar mirip dengan nama seniman pelarian dan ilusionis terkenal Harry Houdini sehingga banyak orang mengira ini adalah trik terbaru Houdini. Houdini mengunjungi Perusahaan Houdina dan terlibat pertengkaran fisik, di mana dia merusak lampu gantung listrik.
Sopir robot John McCarthy
Pada tahun 1969, John McCarthy — yang dikenal sebagai salah satu pendiri kecerdasan buatan — menggambarkan sesuatu yang mirip dengan kendaraan otonom modern dalam sebuah esai berjudul “Mobil yang Dikendalikan Komputer.” McCarthy merujuk pada “sopir otomatis” yang mampu menavigasi jalan umum melalui “input kamera televisi yang menggunakan input visual yang sama dengan yang tersedia bagi pengemudi manusia.”
Dia menulis bahwa pengguna harus dapat memasukkan tujuan menggunakan keyboard, yang kemudian akan meminta mobil untuk segera mengantar mereka ke sana. Perintah tambahan akan memungkinkan pengguna untuk mengubah tujuan, berhenti di kamar kecil atau restoran, memperlambat, atau mempercepat dalam keadaan darurat. Tidak ada kendaraan seperti itu yang dibuat, namun esai McCarthy memaparkan misi yang harus diupayakan oleh peneliti lain.
Tidak Ada Tangan di Seluruh Amerika
Mengemudi Otonom Berbasis Jaringan Syaraf Tiruan
Pada awal tahun 1990-an, peneliti Carnegie Mellon Dekan Pomerleau menulis gelar Ph.D. tesis yang menjelaskan caranya jaringan saraf memungkinkan kendaraan self-driving mengambil gambar mentah dari jalan dan mengeluarkan kontrol kemudi secara real time. Pomerleau bukan satu-satunya peneliti yang mengerjakan mobil self-driving, namun penggunaan jaringan saraf terbukti berhasil lebih efisien dibandingkan upaya alternatif untuk membagi gambar secara manual ke dalam kategori “jalan raya” dan “non-jalan raya”.
Pada tahun 1995, Pomerleau dan rekan peneliti Todd Jochem meluncurkan sistem mobil self-driving Navlab mereka di jalan raya. Minivan otonom mereka yang sederhana (mereka harus mengontrol kecepatan dan pengereman) melakukan perjalanan sejauh 2.797 mil dari pantai ke pantai dari Pittsburgh ke San Diego dalam perjalanan yang mereka sebut “No Hands Across America.”
Tantangan Besar terlalu menantang
DARPA mengumumkan Tantangan Besar pertamanya pada tahun 2002. Hal ini menawarkan para ilmuwan dari lembaga penelitian terkemuka hadiah $1 juta jika mereka dapat membangun kendaraan otonom yang mampu menempuh jarak 142 mil melalui Gurun Mojave.
Tantangan tersebut diadakan pada tahun 2004. Tak satu pun dari 15 peserta mampu menyelesaikan kursus. Entri “pemenang” menempuh jarak kurang dari 8 mil dalam beberapa jam sebelum terbakar. Hal ini merupakan pukulan telak terhadap tujuan pembuatan mobil self-driving yang sebenarnya; setelah berita kebakaran menjadi berita utama, banyak yang berasumsi bahwa otonomi penuh tidak mungkin dicapai.
Parkir menjadi lebih pintar
Audi Piloted Parking (mobil parkir mandiri Audi)
Meskipun kendaraan otonom masih tampak seperti fiksi ilmiah pada tahun 2000-an, sistem parkir mandiri mulai muncul sebagai perlengkapan standar atau opsional (dan sebagian besar pada mobil mewah). Mereka menunjukkan bahwa sensor hampir mampu menangani kondisi dunia nyata yang relatif menantang, seperti parkir paralel di ruang sempit.
Prius hybrid Toyota menawarkan bantuan parkir paralel otomatis pada tahun 2003, sementara Lexus segera menambahkan sistem serupa untuk LSnya, sedan andalannya. Ford meluncurkan Active Park Assist pada tahun 2009, dan BMW menyusul setahun kemudian.
Google mencari jawabannya

Google diam-diam meluncurkan Proyek Mobil Self-Driving pada tahun 2009. Dikenal sebagai Waymo pada tahun 2020, awalnya dipimpin oleh Sebastian Thrun, mantan direktur Laboratorium Kecerdasan Buatan Stanford dan salah satu penemu Google Street View. Butuh waktu beberapa tahun bagi perusahaan untuk mengumumkan bahwa prototipe mereka telah menempuh jarak 300.000 mil di bawah kendali komputer tanpa satu kecelakaan pun, suatu prestasi mengesankan yang membuat banyak orang lengah.
Pada tahun 2014, ia mengungkapkan prototipe otonom tanpa roda kemudi, pedal gas, atau pedal rem; itu 100% otonom. Waymo secara luas dipuji sebagai pemimpin yang tidak terbantahkan dalam teknologi self-driving.
Produsen mobil besar terjun ke dalamnya

Pada tahun 2013, perusahaan mobil termasuk General Motors, Ford, Mercedes-Benz, dan BMW sedang mengerjakan teknologi self-driving mereka sendiri. Otonomi yang sebenarnya terbukti lebih sulit dicapai daripada yang diperkirakan banyak orang, baik dari sudut pandang teknis maupun hukum, dan teknologi yang tersedia bagi konsumen pada tahun 2010-an hanya sebagian yang terotomatisasi.
Kematian mobil otonom pertama

Klaim bahwa teknologi self-driving lebih aman dibandingkan pengemudi manusia dipertanyakan ketika salah satu prototipe berbasis Volvo XC90 milik Uber memukul dan membunuh Elaine Herzberg yang berusia 49 tahun saat dia menyeberang jalan di Arizona. Meskipun dia sedang menyeberang jalan, kecelakaan itu dianggap sepenuhnya dapat dihindari. Petugas polisi menyimpulkan bahwa pengemudi keselamatan Uber (yang seharusnya mengambil alih jika terjadi keadaan darurat) sedang mengawasi Hulu sampai setengah detik sebelum tumbukan.
A.I. datang ke mobil self-driving

Pada CES 2018, Nvidia meluncurkan chip mobil self-driving baru yang diberi nama Xavier, yang menggabungkan kecerdasan buatan. Perusahaan kemudian mengumumkan hal itu bermitra dengan Volkswagen untuk mengembangkan AI. untuk mobil self-driving masa depan. Meskipun ini bukan upaya pertama untuk mengilhami mobil otonom dengan A.I. (Toyota sudah meneliti konsep tersebut dengan MIT dan Stanford), kolaborasi Volkswagen-Nvidia adalah yang pertama menghubungkan A.I. hingga siap produksi perangkat keras. Hal ini membuka kemungkinan bagi mobil self-driving untuk bekerja lebih baik, serta fitur kenyamanan baru seperti asisten digital.
Apa berikutnya?
Pada tahun 2020, sebagian besar produsen mobil telah mengurangi ambisi mereka untuk membuat mobil self-driving dan mengambil pendekatan yang jauh lebih realistis dalam mengembangkan teknologinya. Tidak ada satu pun mobil otonom yang dapat dibeli oleh masyarakat umum, namun beberapa perusahaan berpikir mereka hampir memecahkan kode tersebut. Miliaran dolar dan monopoli yang patut ditiru sedang dipertaruhkan.
Tesla menjual paket opsi bernama Full Self-Driving, tetapi mobilnya tidak otonom dengan cara pengukuran apa pun; pemerintah Jerman secara khusus memintanya untuk berhenti menggunakan istilah ini. Volkswagen adalah mengembangkan teknologinya sendiri, dan berjanji untuk menyebarkannya van otonom retro selama Piala Dunia 2022. Dan pemasok Jerman Bosch bergabung dengan perusahaan induk Mercedes-Benz, Daimler, untuk memasang prototipe otonom berbasis S-Class di jalanan San Jose. Kemitraan, proyek, keberhasilan, dan kegagalan lainnya pasti akan muncul di awal tahun 2020an.
Tingkat otonomi dijelaskan
Meskipun istilah “self-driving” dan “otonom” sering dilontarkan, tidak semua kendaraan memiliki kemampuan yang sama. Itu skala otonomi SAE digunakan untuk menentukan tingkat kemampuan otonom yang berbeda. Berikut rinciannya.
Tingkat 0: Tidak ada otomatisasi. Pengemudi mengontrol kemudi dan kecepatan (baik akselerasi maupun deselerasi) setiap saat, tanpa bantuan sama sekali. Ini termasuk sistem yang hanya memberikan peringatan kepada pengemudi tanpa melakukan tindakan apa pun.
Tingkat 1: Bantuan pengemudi terbatas. Ini mencakup sistem yang dapat mengontrol kemudi dan akselerasi/deselerasi dalam keadaan tertentu, namun tidak keduanya pada saat bersamaan.
Level 2: Sistem bantuan pengemudi yang mengontrol kemudi dan akselerasi/deselerasi. Sistem ini mengalihkan sebagian beban kerja dari pengemudi manusia, namun tetap mengharuskan orang tersebut untuk selalu penuh perhatian.
Tingkat 3: Kendaraan yang dapat mengemudi sendiri dalam situasi tertentu, seperti lalu lintas padat di jalan raya yang terbagi. Intervensi manusia tidak diperlukan ketika mode otonom diaktifkan, namun pengemudi harus siap mengambil alih ketika kendaraan menghadapi situasi yang melebihi batasnya.
Tingkat 4: Kendaraan yang sering kali dapat mengemudi sendiri, namun mungkin memerlukan pengemudi manusia untuk mengambil alih dalam situasi tertentu.
Tingkat 5: Sepenuhnya otonom. Kendaraan level 5 dapat mengemudi sendiri kapan saja, dalam keadaan apa pun. Mereka tidak memerlukan kontrol manual.
Rekomendasi Editor
- Volkswagen meluncurkan program pengujian mobil self-driving di AS.
- Mobil otonom dibingungkan oleh kabut San Francisco
- Apakah lampu check engine Anda menyala? Berikut 10 kemungkinan alasannya
- Dudukan mobil iPhone terbaik di tahun 2023: 10 dudukan mobil terbaik yang dapat Anda beli
- Pasar mobil bekas Tesla tidak lagi menguntungkan, menurut data



