Ha nagy távot szeretnél megtenni, és a világ legjobb sprinterei állnának a rendelkezésére, futnák őket egymás ellen, vagy együtt dolgoznának egy váltóban? Lényegében ez a probléma Elliott Rouse, orvosbiológiai mérnök és a Michigani Egyetem Neurobionics Lab igazgatója, Ann Arbor, évek óta küzd a legjobban.
Tartalom
- Az együttműködés elősegítése
- Itt jön a bionikus láb
Rouse, egy mérnök, egyike a sok közül, akik a bionikus lábak vezérlőrendszerének kifejlesztésén dolgoznak, Mesterséges végtagok amelyek a viselő különböző jeleit használják fel, hogy biológiai végtagokként viselkedjenek és mozogjanak.
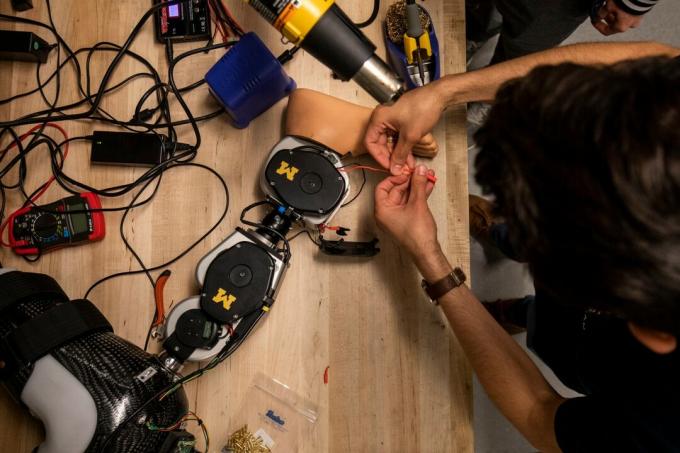
A nyílt forráskódú bionikus láb célja a protézisek gyors előrehaladása
„Valószínűleg a robotláb létrehozásának legnagyobb kihívása a vezérlő, amely megmondja nekik, mit kell tenniük” – mondta Rouse a Digital Trendsnek. „Valahányszor a viselője tesz egy lépést, egy lépést kell kezdeményezni. És amikor váltanak, a lábnak tudnia kell, hogy megváltozott a tevékenységük, és mozognia kell, hogy alkalmazkodjon ehhez a különböző tevékenységhez. Ha hibát követ el, a személy nagyon-nagyon megsérülhet – például leeshet néhány lépcsőről. Világszerte vannak tehetséges emberek, akik tanulmányozzák ezeket az ellenőrzési kihívásokat. Éveket idejükből és több százezer dollárt fektetnek be egy robotláb megépítésébe. Így mennek a dolgok, mióta ez a terület elkezdődött.”
Összefüggő
- A Climeworks épületnyi porszívóval szeretné megtisztítani a légkört
Az együttműködés elősegítése
Csak Rouse szerint ez egy tönkrement rendszer. Érthető, hogy a versengő high-tech cégek titkolóznak, amikor a Next Biget fejlesztik. A reményeik szerint egy gajillió darabot adnak el, és további néhány százmilliárd dollárt vagy még többet fognak hozzáadni a piacukhoz sapka. De kevésbé érthető, amikor a kutatóintézetek elpazarolják a briliáns elméket azzal, hogy ugyanazokat a problémákat oldják meg, amelyeket más egyetemek is megoldanak. A fenébe is, még egykor esküdt ellenségei, az Apple és a Google dolgozzanak együtt, ha a tét elég nagy.
Ajánlott videók
„Az akadémiai rendszer nem túl jó az együttműködésen alapuló kutatás előmozdításában” – ismerte el Rouse. „Professzorként olyan munkám van, ahol mérnek bizonyos dolgokat, mint például a szövetségi finanszírozás, a kiadott ösztöndíjak és az általam mentorált hallgatók. Ha azt nézzük, hogy az akadémiai rendszer hogyan határozza meg a mércét a kutatólaboratóriumok oktatói számára, akkor az együttműködés [valójában egyfajta] hangsúlytalanná válik.”
Amikor a bionikus végtagok vezérlőrendszereiről van szó, az a probléma, hogy még az induláshoz is vezérlőrendszereket fejlesztenek, az egyes kutatólaboratóriumoknak szerte a világon először meg kell építeniük az alapját hardver. Visszatérve a korábbi hasonlathoz, ez rosszabb, mintha az Apple és a Samsung szigorúan titkosan fejlesztene egymással versengő okostelefonokat; inkább olyan lenne, mintha az Apple-nek és a Samsungnak a semmiből kellene megépítenie saját számítógépes operációs rendszerét, mielőtt elkezdené tervezni a következő generációját okostelefon.
Ez az, ahol Rouse projektje, a Nyílt forráskódú láb, játékba lép. Amint azt a mögötte álló kutatók egy külön weboldalon kifejtik: „A projekt átfogó célja egyesíteni a A protézis hardvertervezés, a protézisek vezérlése és az amputált biomechanika területén jelenleg töredezett terepkutatás folyik. silók. Minden kutató kifejleszti saját robotláb-rendszerét, amelyen tesztelheti irányítási stratégiáit vagy biomechanikai hipotéziseit. Ez rövid távon sikeres lehet, hiszen minden kutató publikál és továbbfejleszti a tudást. Hosszú távon azonban ez a széttagolt kutatási megközelítés megakadályozza, hogy az eredmények befolyásolják az életüket fogyatékossággal élő egyének – ami a terület átfogó kudarcában csúcsosodik ki, hogy valóban kifejtse hatását motiválta.”
Itt jön a bionikus láb
A nyílt forráskódú láb, ahogy a neve is sugallja, egy nyílt forráskódú bionikus láb, amely a mindenütt megtalálható hardverrendszerré válhat a protézisek vezérlésének területén. A kialakítás egyszerű (értsd: könnyen összeszerelhető), hordozható (könnyű és fedélzeti akkumulátorral működik), gazdaságos (költséges) 10 000 és 25 000 dollár között, a 100 000 dollár plusz kereskedelemben kapható motoros protézishez képest), méretezhető és testreszabható. A részletes utasítások online követhetők, és Rouse és kollégái meg is fogják őket készíteni, és kiküldik a kutatóknak, ha maguk nem hozhatnak létre.

Ennek során a projekt három cél elérésére törekszik. Ezek közül az első egy olyan elektromechanikus kialakítás azonosítása, amely alacsony költségű, nagy teljesítményű, nyílt forráskódú, robotizált térd- és bokarendszerekhez használható. Másodszor, annak megértése, hogy a különálló protézis-szabályozási stratégiák hogyan kombinálhatók az amputált járás javára. Végül, a nyílt forráskódú láb projekt szeretné érvényesíteni javasolt nyílt forráskódú rendszerét, mint a protézisvezérlés kutatásának eszközét. Ha ezeket a kutatási célokat sikerül elérni, kiderülhet, hogy az alkotók szerint ez lesz a változás.
„Életem során meglátjuk bionikus végtagok, amelyek használhatják az idegi információkat, akár a kortikális, akár a perifériás idegek szintjén, hogy elmondhassuk a durva mozgást” – mondta Rouse. "Ezáltal irányítást biztosítunk anélkül, hogy fedélzeti érzékelőkre lenne szükség." Ez a forradalom – mondta – már megtörténik. Bár a finom szemű ügyes mozgás ennél tovább tarthat, nem feltétlenül sci-fi álom, amely sok életre van attól, hogy megtörténjen.
És ha az emberek rájönnek, hogyan dolgozzanak együtt, akkor sokkal gyorsabban megérkezhet.
Szerkesztői ajánlások
- Hogyan változtatta meg örökre a 3D nyomtatás a végtagprotézisek világát



