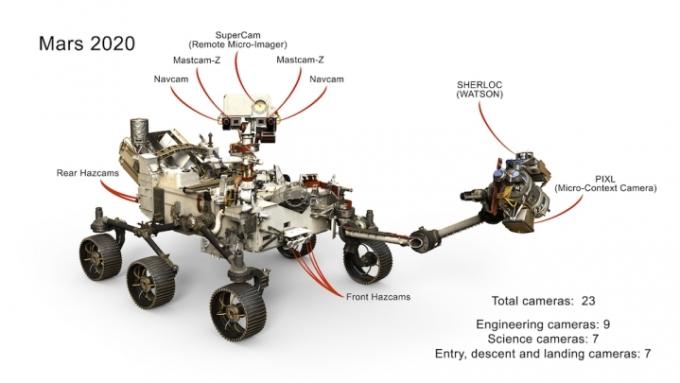
NASA-in najnoviji marsovski rover - Perseverance - najnapredniji je do sada, noseći sa sobom mnoštvo tehnologije koja uključuje paket od 23 kamere.
Sadržaj
- Kamere za slijetanje
- Inženjerske kamere
- Znanstvene kamere
Već smo bili počastili nevjerojatnim snimkama s nekoliko kamera, snimljeno dok se rover približavao površini crvenog planeta 18. veljače 2021. Unutar nekoliko minuta od dolaska na mjesto slijetanja Krater Jezero, Perseverance je također poslao nekoliko fotografija natrag na Zemlju, nakon čega su nekoliko dana kasnije uslijedile prve visokokvalitetne slike koje prikazuju njegovo novo okruženje sa zadivljujućim detaljima.
Preporučeni videozapisi
Kako su kamere postavljene da igraju ključnu ulogu u dvogodišnjoj misiji rovera, mislili smo da bi bila dobra ideja saznati nešto više o tehnologija iza svakog uređaja i što možemo očekivati od njih dok Perseverance kreće u istraživanje dalekog planeta u potrazi za znakovima prošlosti život.
Povezano
- Snimanje ove fotografije Marsa od 1,8 milijardi piksela roveru Curiosity trebalo je 4 dana
Kamere za slijetanje
Glavna uloga: Snimite slike i gore i dolje tijekom spuštanja rovera kroz Marsovu atmosferu.

Svemirska letjelica koja je nosila Perseverance koristila je više od četiri kamere visoke razlučivosti za snimanje neizvjesnog spuštanja na površinu Marsa. Snimka (ispod) lako je nudila najbolje vizualne prikaze bilo kojeg od NASA-inih pet slijetanja na Mars do danas, s kamerama pažljivo postavljenim da zabilježe što veći dio vožnje nizbrdo.
A snimka nije bila samo u svrhu oduševljenja ljubitelja svemira. Također je inženjerima pružio vitalne informacije o tome kako se točno ponaša sustav za slijetanje, što bi im trebalo pomoći u dizajniranju boljih svemirskih letjelica za buduće misije na Mars.
Spuštanje i spuštanje Perseverance Rovera na Mars (službeni NASA-in video)
Padobranske "gore" kamere
Oni su bili postavljeni na stražnju školjku letjelice i usmjereni prema gore kako bi se uhvatilo otvaranje padobrana i napuhavanje. Snimka je inženjerima ponudila njihov prvi uvid u to kako se padobran ponaša u tankom marsovskom okruženju, omogućujući im da poboljšaju dizajn za buduće misije.
Kamera za spuštanje s pogledom prema dolje
Smještena na pozornici za spuštanje svemirske letjelice, ova kamera je bila okrenuta prema dolje kako bi snimila snimku rovera kako ga spuštaju kablovi na površinu Marsa, iako je u posljednjim trenucima vozilo bilo zaklonjeno prašinom koju je podigla faza spuštanja potisnici.
Roverova kamera "gore"
Pričvršćena na palubu rovera, ova kamera okrenuta prema gore uhvatila je fazu spuštanja tijekom ključnih završnih trenutaka prije dodira. Opet, sve ove snimke bit će korisne inženjerima koji dizajniraju buduće svemirske letjelice za Mars, od kojih će jedna dovesti prve astronaute na Mars.
Rover kamera "pogled prema dolje".
Ova je kamera bila postavljena ispod rovera i usmjerena ravno u tlo. Zabilježio je učinak potisnika stupnja spuštanja na prašnjavu površinu dok je vozilo dodirivalo tlo.
Inženjerske kamere
Perseverance je NASA-in peti marsovski rover i vjerojatno najpametniji dosad. Dio novog kompleta uključuje novu generaciju inženjerskih kamera (HazCam/NavCam/CacheCam) koje će skenirati tlo za opasnosti, nadzirati stanje hardvera rovera i podržati prikupljanje uzoraka. Poboljšane inženjerske kamere imaju isti dizajn kućišta kamere, ali svaka ima različite leće koje su posebno dizajnirane za jedinstven zadatak.
HazCams (kamere za opasnost)
Glavna uloga: pomoć autonomnoj navigaciji
Bila je to jedna od šest roverovih HazCam kamera koje su vratile prve slike (ispod) s Perseverancea nakon njegova dramatičnog slijetanja na crveni planet u veljači 2021. Također je uhvatio trenutak stupanj spuštanja izveo je kontrolirano prinudno slijetanje nedugo nakon isporuke Perseverancea na površinu Marsa.

Budući da je Mars malo izvan dometa za AAA, posljednje što NASA-i treba je da Perseverance zaglavi u pješčanoj dini ili se zabije u stijenu. Tu na scenu stupaju HazCams. S četiri sprijeda i dvije sa stražnje strane, ove kamere neprestano paze na sve prepreke koje se pojavljuju na putu rovera dok se kreće po površini Marsa.
Računalni softver automatski analizira 3D slike HazCams-a i zatim koristi te informacije kako bi samostalno odlučio kamo ići. Ove pametne tehnologije samovožnje omogućuju Perseveranceu da nastavi bez potrebe za stalnim savjetovanjem s članovima tima Zemlja, iako je tim taj koji u konačnici odlučuje o glavnom smjeru kretanja rovera tijekom njegovog misija.
HazCams također obavlja još jednu vitalnu ulogu pomažući inženjerima da odluče gdje premjestiti Perseveranceovu robotsku ruku prilikom mjerenja i fotografiranja.
NavCams (navigacijske kamere)
Glavna uloga: pomoć autonomnoj navigaciji
NASA-in prvi pogled na Mars od 360 stupnjeva (službeno)
Perseverance ima dvije stereo navigacijske kamere u boji ili skraćeno NavCams. Nalaze se oko 16,5 inča (42 cm) na vrhu središnjeg jarbola rovera i dio su opreme koja pomaže vozilu da vozi autonomno. Prema NASA-i, NavCams su dovoljno napredne da uoče objekt malen poput loptice za golf s udaljenosti od 82 stope (25 metara). Također pružaju neke prilično sjajne panorame, poput ove iznad snimljene samo nekoliko dana nakon misije na Mars.
CacheCam
Glavna uloga: Snimite detaljne slike prikupljenih uzoraka stijena nakon što su stavljeni u epruvetu s uzorkom.

CacheCam se nalazi u donjem dijelu rovera na vrhu spremnika uzoraka. Koristit će se za snimanje slika stijena i tla postavljeni unutar epruveta za uzorke od strane Perseverancea tijekom njegovih istraživanja, s tim da će dio materijala vjerojatno biti vraćen na Zemlju tijekom buduće misije. CacheCam će također omogućiti znanstvenicima da vode evidenciju o vrsti materijala koji prikupljaju s površine Marsa.
Znanstvene kamere
Perseverance napredne znanstvene kamere uključuju Mastcam-Z, SuperCam, PIXL, SHERLOC i Watson. Svaki je dizajniran za obavljanje vitalnog posla koji bi mogao pomoći u određivanju je li nekoć postojao život na Marsu.
Mastcam-Z
Glavna uloga: Snimite video visoke razlučivosti, panoramske fotografije u boji i 3D slike Marsove površine i značajki u atmosferi
Mastcam-Z sastoji se od dvije kamere (postavljene između NavCam kamera) koje nude pogled na okolinu od 360 stupnjeva. Također uključuje funkciju zumiranja (da, "Z" označava zumiranje), iako je prilično naprednija od one na vašem pametni telefon fotoaparat. Zapravo, prema NASA-i, Mastcam-Z "može vidjeti karakteristike male poput kućne muhe - sve s udaljenosti koja je otprilike jednaka duljini nogometnog igrališta."
Sastavljena od 142 zasebne snimke koje je sve snimio Mastcam-Z, slika u nastavku daje vam dobru ideju o impresivnoj snazi Mastcam-Z-a. Pokušajte pritisnuti gumb "+" za povećanje za više detalja ili krenite ovdje za snimanje slike preko cijelog zaslona.
S nevjerojatnom tehnologijom poput ove, Mastcam-Z također može pomoći znanstvenicima da odluče koja područja zaslužuju daljnje istraživanje u NASA-inoj potrazi za dokazima prošlih života.
SuperCam
Glavna uloga: Identificirati kemijski sastav stijena i tla, uključujući njihov atomski i molekularni sastav.
U skladu sa svojim imenom, SuperCam je montiran na samom vrhu jarbola Perseverancea i sadrži nekoliko vrlo impresivnih pametnih uređaja. Za početak, sposoban je ispaliti laser, iako srećom neće ciljati na Marsovce na koje bismo mogli naići. Umjesto toga, laser će se fokusirati na mineralne mete koje robotska ruka rovera ne može dosegnuti.
Prilikom ispaljivanja na malo područje stijene s udaljenosti od oko 20 stopa (7 metara), laser će izazvati stvaranje vrućeg plina sastavljenog od slobodno lebdećih iona i elektrona. SuperCam će zatim analizirati ispareni kamen kako bi otkrio njegov elementarni sastav. Ovaj postupak ima potencijal za otkrivanje organskih spojeva koji bi također mogli biti povezani s prošlim životom na Marsu.
PIXL (Planetarni instrument za rendgensku litokemiju)
Glavna uloga: Mjerenje kemijskog sastava stijena u vrlo finom mjerilu
PIXL se nalazi na kraju robotske ruke rovera i koristi X-zrake za prepoznavanje kemijskih elemenata u ciljnim točkama za koje NASA kaže da mogu biti male poput zrna kuhinjske soli. PIXL uključuje mikrokontekstnu kameru koja će pružiti slike koje će mu pomoći u povezivanju mapa elementarnog sastava s vidljivim karakteristikama ciljanog područja.
SHERLOC (Skeniranje okoliša pogodnih za stanovanje s Ramanom i luminescencijom za organske tvari i kemikalije)
Glavna uloga: Precizna detekcija minerala, organskih molekula i potencijalnih biopotpisa

SHERLOC, koji se također nalazi na kraju Perseveranceove robotske ruke, uključuje kamere, spektrometre i laser. Uređaj traži organske tvari i minerale koje je izmijenilo vodeno okruženje dok traži znakove života mikroba iz prošlosti. SHERLOC također igra ključnu ulogu u istraživanje novih svemirskih odijela za prvu ljudsku misiju na Mars.
WATSON (širokokutni topografski senzor za operacije i inženjering)
Glavna uloga: Snimite fotografije tekstura stijena izbliza
Uz imena kao što su SHERLOC i WATSON, ne morate biti super detektiv da shvatite da ove dvije kamere rade zajedno tijekom misije na Mars.
Kao i SHERLOC, WATSON se također nalazi na kraju roverove robotske ruke. Kamera u boji dizajnirana je kako bi znanstvenicima pružila podatke o teksturama i strukturama marsovskih stijena. “WATSON snima slike koje premošćuju razmjere od vrlo detaljnih slika i karata koje SHERLOC prikuplja od Marsovski minerali i organski dijelovi, do širih razmjera koje SuperCam i Mastcam-Z promatraju s jarbola,” NASA rekao je.
S toliko kamera i druge znanstvene opreme na roveru, Perseverance će sigurno doći do nekih fascinantnih otkrića dok istražuje površinu Marsa tijekom svoje dvogodišnje misije. Stoga svakako provjerite ima li ažuriranja.
Preporuke urednika
- Nova Perseverance panorama omogućuje vam zumiranje kako biste vidjeli nevjerojatne detalje



