एक बार हॉलीवुड-एस्क पाइप सपने से थोड़ा अधिक, स्वचालित कारें 2010 के दशक में एक वास्तविकता बन गईं, जिसका मुख्य कारण Google जैसी तकनीकी कंपनियों द्वारा किए गए शोध थे। हालाँकि वे अभी तक मुख्यधारा में विलीन नहीं हुए हैं और लेखन के समय तक आप उन्हें खरीद भी नहीं सकते हैं, सेल्फ-ड्राइविंग प्रोटोटाइप हमारे देश की सड़कों पर हर साल लाखों मील की दूरी तय करते हैं।
अंतर्वस्तु
- ड्राइवर रहित सपना शुरू होता है
- जॉन मैक्कार्थी का रोबो-चालक
- पूरे अमेरिका में कोई हाथ नहीं
- ग्रैंड चैलेंज बहुत चुनौतीपूर्ण है
- पार्किंग स्मार्ट हो गई है
- Google उत्तर खोजता है
- बड़ी कार निर्माता इसमें गोता लगाती हैं
- पहली स्वायत्त कार दुर्घटना
- ए.आई. सेल्फ-ड्राइविंग कारों की बात आती है
- आगे क्या होगा?
- स्वायत्तता के स्तर की व्याख्या की गई
सेल्फ-ड्राइविंग कारों के इतिहास को 10 से कम मील के पत्थर में समेटना आसान नहीं है, लेकिन हमने अपना सर्वश्रेष्ठ प्रयास किया है।
अनुशंसित वीडियो
ड्राइवर रहित सपना शुरू होता है
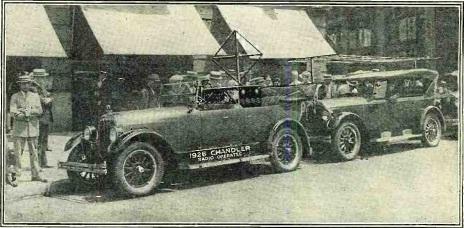
ऑटोमोबाइल के जन्म के बाद आविष्कारकों को स्वायत्त वाहनों के बारे में सोचना शुरू करने में ज्यादा समय नहीं लगा। 1925 में, आविष्कारक फ्रांसिस हौडिना
प्रदर्शन किया एक रेडियो-नियंत्रित कार, जिसे उन्होंने स्टीयरिंग व्हील पर किसी के बिना मैनहट्टन की सड़कों पर चलाया। न्यूयॉर्क टाइम्स की एक रिपोर्ट के अनुसार, रेडियो-नियंत्रित वाहन अपने इंजन को चालू करने, गियर बदलने और अपने हॉर्न को बजाने में सक्षम था "मानो पहिया पर कोई प्रेत हाथ हो।"एक मनोरंजक बात के रूप में, हौडिना का नाम प्रसिद्ध भागने वाले कलाकार और भ्रम फैलाने वाले हैरी हौदिनी की तरह लग रहा था, जिससे बहुत से लोगों को लगा कि यह हौदिनी की नवीनतम चाल थी। हौदिनी ने हौडिना कंपनी का दौरा किया और एक शारीरिक विवाद में पड़ गया, जिसके दौरान उसने एक बिजली का झूमर तोड़ दिया।
जॉन मैक्कार्थी का रोबो-चालक
1969 में, जॉन मैक्कार्थी - जिन्हें कृत्रिम बुद्धिमत्ता के संस्थापकों में से एक के रूप में जाना जाता है - ने "" शीर्षक वाले एक निबंध में आधुनिक स्वायत्त वाहन के समान कुछ का वर्णन किया है।कंप्यूटर-नियंत्रित कारें।” मैक्कार्थी ने एक "स्वचालित ड्राइवर" का उल्लेख किया जो "टेलीविज़न कैमरा इनपुट के माध्यम से सार्वजनिक सड़क पर चलने में सक्षम है जो मानव चालक के लिए उपलब्ध समान दृश्य इनपुट का उपयोग करता है।"
उन्होंने लिखा कि उपयोगकर्ताओं को एक कीबोर्ड का उपयोग करके गंतव्य में प्रवेश करने में सक्षम होना चाहिए, जो कार को तुरंत उन्हें वहां ले जाने के लिए संकेत देगा। अतिरिक्त आदेश उपयोगकर्ताओं को आपातकालीन स्थिति में गंतव्य बदलने, शौचालय या रेस्तरां में रुकने, गति धीमी करने या गति बढ़ाने की अनुमति देंगे। ऐसा कोई वाहन नहीं बनाया गया था, लेकिन मैक्कार्थी के निबंध ने अन्य शोधकर्ताओं के लिए काम करने का मिशन तैयार किया।
पूरे अमेरिका में कोई हाथ नहीं
तंत्रिका नेटवर्क-आधारित स्वायत्त ड्राइविंग
1990 के दशक की शुरुआत में, कार्नेगी मेलन शोधकर्ता डीन पोमेरलेउ एक पीएच.डी. लिखा. थीसिस वर्णन करती है कि कैसे तंत्रिका - तंत्र एक स्व-चालित वाहन को सड़क से कच्ची तस्वीरें लेने और वास्तविक समय में स्टीयरिंग नियंत्रण आउटपुट करने की अनुमति मिल सकती है। पोमेरलेउ सेल्फ-ड्राइविंग कारों पर काम करने वाले एकमात्र शोधकर्ता नहीं थे, लेकिन न्यूरल नेट का उनका उपयोग कारगर साबित हुआ छवियों को मैन्युअल रूप से "सड़क" और "गैर-सड़क" श्रेणियों में विभाजित करने के वैकल्पिक प्रयासों की तुलना में अधिक कुशल।
1995 में, पोमेरलेउ और साथी शोधकर्ता टॉड जोकेम ने अपनी नवलैब सेल्फ-ड्राइविंग कार प्रणाली को सड़क पर उतारा। उनके नंगे हड्डियों वाले स्वायत्त मिनीवैन (उन्हें गति और ब्रेकिंग को नियंत्रित करना था) ने पिट्सबर्ग से सैन डिएगो तक 2,797 मील तट-से-तट की यात्रा की, इस यात्रा को इस जोड़ी ने "नो हैंड्स अक्रॉस अमेरिका" करार दिया।
ग्रैंड चैलेंज बहुत चुनौतीपूर्ण है
DARPA ने 2002 में अपनी पहली ग्रैंड चैलेंज की घोषणा की। इसने शीर्ष अनुसंधान संस्थानों के वैज्ञानिकों को $1 मिलियन का पुरस्कार देने की पेशकश की, यदि वे मोजावे रेगिस्तान के माध्यम से 142-मील का रास्ता तय करने में सक्षम एक स्वायत्त वाहन बना सकते हैं।
यह चुनौती 2004 में आयोजित की गई थी। 15 प्रतिभागियों में से कोई भी पाठ्यक्रम पूरा करने में सक्षम नहीं था। आग लगने से पहले "विजेता" प्रविष्टि ने कई घंटों में 8 मील से भी कम दूरी तय की। यह वास्तविक स्व-चालित कारों के निर्माण के लक्ष्य के लिए एक हानिकारक झटका था; आग लगने की खबर सुर्खियाँ बनने के बाद, कई लोगों ने मान लिया कि पूर्ण स्वायत्तता तक पहुँचना असंभव था।
पार्किंग स्मार्ट हो गई है
ऑडी पायलटेड पार्किंग (ऑडी की सेल्फ-पार्किंग कार)
जबकि 2000 के दशक में स्वायत्त वाहन अभी भी विज्ञान कथा की तरह दिखते थे, स्व-पार्किंग सिस्टम या तो मानक या वैकल्पिक उपकरण (और ज्यादातर लक्जरी कारों पर) के रूप में उभरने लगे। उन्होंने प्रदर्शित किया कि सेंसर अपेक्षाकृत चुनौतीपूर्ण वास्तविक दुनिया की स्थितियों, जैसे तंग जगह में समानांतर पार्किंग, से निपटने में सक्षम होने के करीब थे।
टोयोटा की हाइब्रिड प्रियस ने 2003 में स्वचालित समानांतर-पार्किंग सहायता की पेशकश की, जबकि लेक्सस ने जल्द ही एक समान प्रणाली जोड़ी एल.एस, इसकी प्रमुख सेडान। फोर्ड ने 2009 में एक्टिव पार्क असिस्ट लॉन्च किया, और बीएमडब्ल्यू ने एक साल बाद इसका अनुसरण किया।
Google उत्तर खोजता है

Google ने 2009 में गुप्त रूप से अपना सेल्फ-ड्राइविंग कार प्रोजेक्ट लॉन्च किया। 2020 में वेमो के नाम से जाना जाने वाला, शुरुआत में इसका नेतृत्व स्टैनफोर्ड आर्टिफिशियल इंटेलिजेंस लेबोरेटरी के पूर्व निदेशक और Google स्ट्रीट व्यू के सह-आविष्कारक सेबेस्टियन थ्रुन ने किया था। कंपनी को यह घोषणा करने में कुछ साल लग गए कि उसके प्रोटोटाइप ने एक भी दुर्घटना के बिना कंप्यूटर नियंत्रण के तहत सामूहिक रूप से 300,000 मील की दूरी तय की, एक प्रभावशाली उपलब्धि जिसने कई लोगों को चौंका दिया।
2014 में, इसने स्टीयरिंग व्हील, गैस पेडल या ब्रेक पेडल के बिना एक स्वायत्त प्रोटोटाइप का खुलासा किया; यह 100% स्वायत्त था। वेमो की व्यापक रूप से सराहना की जाती है निर्विरोध नेता सेल्फ-ड्राइविंग तकनीक में।
बड़ी कार निर्माता इसमें गोता लगाती हैं

2013 तक, जनरल मोटर्स, फोर्ड, मर्सिडीज-बेंज और सहित कार कंपनियां बीएमडब्ल्यू अपनी स्वयं-ड्राइविंग तकनीकों पर काम कर रहे थे। तकनीकी और कानूनी दृष्टिकोण से, वास्तविक स्वायत्तता प्राप्त करना कई लोगों की तुलना में अधिक कठिन साबित हुआ, और 2010 के दशक में उपभोक्ताओं के लिए उपलब्ध तकनीक आंशिक रूप से स्वचालित थी।
पहली स्वायत्त कार दुर्घटना

दावा किया गया कि सेल्फ-ड्राइविंग तकनीक मानव चालकों की तुलना में अधिक सुरक्षित है, जब उबर के वोल्वो XC90-आधारित प्रोटोटाइप में से एक पर सवाल उठाया गया था। 49 वर्षीय इलेन हर्ज़बर्ग को मारा और मार डाला जब वह एरिज़ोना में एक सड़क पार कर रही थी। हालाँकि वह सफ़र पर चल रही थी, दुर्घटना को पूरी तरह से टाला जा सकता था। पुलिस अधिकारियों ने निष्कर्ष निकाला कि उबर का सुरक्षा ड्राइवर (जिसे आपातकालीन स्थिति में कार्यभार संभालना होता है) निगरानी कर रहा था Hulu प्रभाव से आधा सेकंड पहले तक.
ए.आई. सेल्फ-ड्राइविंग कारों की बात आती है

पर सीईएस 2018, एनवीडिया ने एक नई सेल्फ-ड्राइविंग कार चिप का अनावरण किया, जिसे कहा जाता है जेवियर, जिसमें कृत्रिम बुद्धिमत्ता शामिल है। कंपनी ने तब घोषणा की कि यह था वोक्सवैगन के साथ साझेदारी ए.आई. विकसित करना भविष्य की सेल्फ-ड्राइविंग कारों के लिए। जबकि स्वायत्त कारों को ए.आई. से युक्त करने का यह पहला प्रयास नहीं है। (टोयोटा पहले से ही इस अवधारणा पर शोध कर रहा था एमआईटी और स्टैनफोर्ड), वोक्सवैगन-एनवीडिया सहयोग ए.आई. को जोड़ने वाला पहला सहयोग है। उत्पादन के लिए तैयार हार्डवेयर. यह सेल्फ-ड्राइविंग कारों के बेहतर प्रदर्शन की संभावना को खोलता है, साथ ही डिजिटल सहायक जैसी नई सुविधा सुविधाओं के लिए भी।
आगे क्या होगा?
2020 में, अधिकांश वाहन निर्माताओं ने अपनी सेल्फ-ड्राइविंग कार महत्वाकांक्षाओं को ठंडा कर दिया है और प्रौद्योगिकी विकसित करने के लिए कहीं अधिक यथार्थवादी दृष्टिकोण अपनाया है। ऐसी एक भी स्वायत्त कार नहीं है जिसे आम जनता खरीद सके, लेकिन कुछ कंपनियां सोचती हैं कि वे कोड को क्रैक करने के करीब हैं। अरबों डॉलर और एक गहरा एकाधिकार दांव पर है।
टेस्ला फुल सेल्फ-ड्राइविंग नामक एक विकल्प पैकेज बेचता है, लेकिन इसकी कारें माप के किसी भी माध्यम से स्वायत्त नहीं हैं; जर्मन सरकार ने विशेष रूप से इस शब्द का उपयोग बंद करने के लिए कहा। वोक्सवैगन है घर में ही प्रौद्योगिकी विकसित करना, और इसे तैनात करने का वचन दिया रेट्रो स्वायत्त वैन 2022 विश्व कप के दौरान. और जर्मन आपूर्तिकर्ता बॉश सैन्यदल में शामिल हुए सैन जोस की सड़कों पर स्वायत्त एस-क्लास-आधारित प्रोटोटाइप लगाने के लिए मर्सिडीज-बेंज की मूल कंपनी डेमलर के साथ। अन्य साझेदारियाँ, परियोजनाएँ, सफलताएँ और असफलताएँ निस्संदेह 2020 की शुरुआत में सामने आएंगी।
स्वायत्तता के स्तर की व्याख्या की गई
हालाँकि "स्वचालित" और "स्वायत्त" शब्द बहुत प्रचलित हैं, लेकिन सभी वाहनों की क्षमताएँ समान नहीं होती हैं। एसएई स्वायत्तता पैमाना स्वायत्त क्षमता के विभिन्न स्तरों को निर्धारित करने के लिए उपयोग किया जाता है। यहाँ एक ब्रेकडाउन है।
स्तर 0: कोई स्वचालन नहीं. ड्राइवर बिना किसी सहायता के हर समय स्टीयरिंग और गति (त्वरण और मंदी दोनों) को नियंत्रित करता है। इसमें ऐसे सिस्टम शामिल हैं जो ड्राइवर को बिना कोई कार्रवाई किए केवल चेतावनी देते हैं।
स्तर 1: सीमित ड्राइवर सहायता। इसमें वे प्रणालियाँ शामिल हैं जो विशिष्ट परिस्थितियों में स्टीयरिंग और त्वरण/मंदी को नियंत्रित कर सकती हैं, लेकिन एक ही समय में दोनों को नहीं।
लेवल 2: ड्राइवर-सहायता प्रणालियाँ जो स्टीयरिंग और त्वरण/मंदी दोनों को नियंत्रित करती हैं। ये प्रणालियाँ कुछ कार्यभार को मानव चालक से दूर कर देती हैं, लेकिन फिर भी उस व्यक्ति को हर समय चौकस रहने की आवश्यकता होती है।
स्तर 3: ऐसे वाहन जो कुछ स्थितियों में स्वयं चल सकते हैं, जैसे विभाजित राजमार्गों पर घने यातायात में। स्वायत्त मोड चालू होने पर मानवीय हस्तक्षेप की आवश्यकता नहीं होती है, लेकिन जब वाहन को अपनी सीमा से अधिक स्थिति का सामना करना पड़ता है तो ड्राइवर को स्थिति संभालने के लिए तैयार रहना चाहिए।
स्तर 4: ऐसे वाहन जो अधिकांश समय स्वयं चल सकते हैं, लेकिन कुछ स्थितियों में उन्हें संभालने के लिए मानव चालक की आवश्यकता हो सकती है।
स्तर 5: पूर्णतः स्वायत्त. लेवल 5 के वाहन हर समय, हर परिस्थिति में स्वयं चल सकते हैं। उन्हें मैन्युअल नियंत्रण की कोई आवश्यकता नहीं है.
संपादकों की सिफ़ारिशें
- वोक्सवैगन अमेरिका में अपना स्वयं का सेल्फ-ड्राइविंग कार परीक्षण कार्यक्रम शुरू कर रहा है।
- सैन फ्रांसिस्को के कोहरे से स्वायत्त कारें भ्रमित हो गईं
- क्या आपकी इंजन जांचें लाइट चालू है? यहां 10 संभावित कारण बताए गए हैं
- 2023 में सबसे अच्छी iPhone कार माउंट: शीर्ष 10 सर्वश्रेष्ठ जिन्हें आप खरीद सकते हैं
- डेटा से पता चलता है कि टेस्ला की प्रयुक्त कारों का बाज़ार अब उतना आकर्षक नहीं रहा



