अंतर्राष्ट्रीय अंतरिक्ष स्टेशन (आईएसएस) में दो अंतरिक्षयात्रियों ने गुरुवार, 28 अप्रैल को पहली बार सुविधा की नई रोबोटिक भुजा को सक्रिय किया।
रूसी अंतरिक्ष यात्री ओलेग आर्टेमयेव और डेनिस मतवेव ने शाम 6:40 बजे अपना स्पेसवॉक समाप्त किया। 7 बजे के बाद ईटी आईएसएस के बाहर घंटे और 42 मिनट, जिसमें से अधिकांश समय यूरोपीय रोबोटिक आर्म पर काम करने में व्यतीत हुआ (ईआरए)।
अनुशंसित वीडियो
युग पिछले साल जुलाई में स्टेशन पर पहुंचे लेकिन यह गुरुवार तक थर्मल कंबल से ढका रहा।
संबंधित
- अंतरिक्ष यात्रियों ने अंतर्राष्ट्रीय अंतरिक्ष स्टेशन पर पांचवां नया सौर सरणी स्थापित किया
- अंतरिक्ष स्टेशन पर फिर से भीड़ बढ़ने लगी है
- चार अंतरिक्ष स्टेशन के अंतरिक्ष यात्री क्रू ड्रैगन को 'घूमने' के लिए ले गए
नासा ने पृथ्वी से लगभग 250 मील ऊपर दो अंतरिक्ष यात्रियों के फुटेज (नीचे) साझा किए, जब वे रोबोटिक भुजा को उसके पहले वर्कआउट से पहले उसकी बाधाओं से मुक्त करने के लिए काम कर रहे थे।
स्टेशन की नई रोबोटिक भुजा @ईएसए नौका मॉड्यूल पर लगे प्रतिबंधों से मुक्त कर दिया गया है और अब यह गति में है। https://t.co/yuOTrYN8CVpic.twitter.com/5h7PHORXuM
- अंतर्राष्ट्रीय अंतरिक्ष स्टेशन (@Space_Station) 28 अप्रैल 2022
इस स्तर तक पहुंचने में काफी समय लग गया है। ईआरए को 30 साल से भी पहले डिज़ाइन किया गया था, और पिछले 20 वर्षों में विभिन्न तकनीकी मुद्दों के कारण आईएसएस के लिए तीन नियोजित मिशन चूक गए।
लेकिन अब यूरोपीय अंतरिक्ष एजेंसी (ईएसए) के इंजीनियर अंततः अंतरिक्ष में हाथ की पहली सक्रियता का जश्न मना सकते हैं।
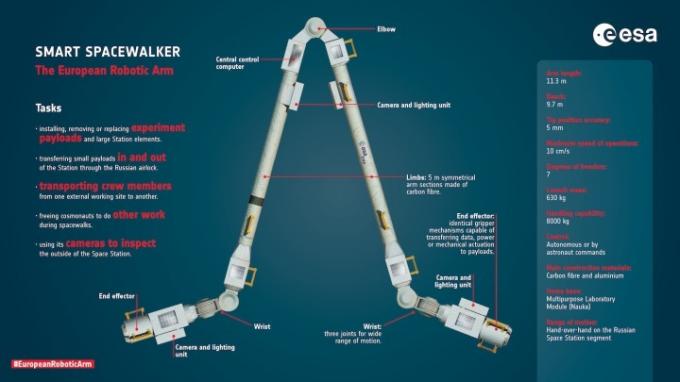
नया रोबोटिक हाथ लगभग 11 मीटर लंबा है, इसका वजन 1,390 पाउंड (630 किलोग्राम) है, और इसमें सात जोड़ शामिल हैं जो उच्च स्तर की गतिशीलता प्रदान करते हैं।
ईआरए का उपयोग मुख्य रूप से प्रयोग पेलोड और बड़े घटकों को स्थापित करने, हटाने और बदलने के लिए किया जाएगा; रूसी एयरलॉक के माध्यम से स्टेशन के अंदर और बाहर छोटे पेलोड स्थानांतरित करना; अंतरिक्ष यात्रियों को आईएसएस के एक हिस्से से दूसरे हिस्से तक "चेरी-पिकर क्रेन की तरह" ले जाना; और अपने चार कैमरों का उपयोग करके अंतरिक्ष स्टेशन के बाहरी हिस्से की निगरानी और निरीक्षण करता है।
जबकि अंतरिक्ष स्टेशन में पहले से ही दो परिचालन रोबोटिक हथियार हैं - कनाडा का कैनाडर्म 2 और जापानी प्रयोग मॉड्यूल रिमोट मैनिपुलेटर सिस्टम - ईआरए है सबसे पहले आईएसएस के रूसी खंड के बाहर तैनात किया जाएगा, और इससे अंतरिक्ष यात्रियों को इसके बाहर रखरखाव और उन्नयन कार्य करते समय अधिक पहुंच मिलेगी। सुविधा।
ईएसए के अनुसार, "स्मार्ट स्पेसवॉकर" नामक नई भुजा, "चलने के लिए बनाई गई" है, क्योंकि इसमें निश्चित आधार बिंदुओं के बीच हाथ से हाथ ले जाने की क्षमता है।
“स्टेशन के रूसी हिस्सों के चारों ओर हाथ से चलते हुए, यूरोपीय रोबोटिक शाखा और अधिक लाएगी अंतरिक्ष संचालन के लिए स्वतंत्रता, अधिक लचीलापन और अधिक कौशल, ”एजेंसी ने अपने नए आईएसएस के बारे में कहा अवयव।
ईआरए को पूरी तरह से चालू करने के लिए काम में कुल मिलाकर पांच स्पेसवॉक लगेंगे। इनमें से पहला पिछले सप्ताह हुआ और इसमें एक नियंत्रण कक्ष की स्थापना शामिल थी। गुरुवार को दूसरा था और इसमें पहली बार अंतरिक्ष में हाथ हिलाना शामिल था, जबकि तीसरा स्पेसवॉक वर्तमान में मई के लिए निर्धारित है।
संपादकों की सिफ़ारिशें
- अंतरिक्ष स्टेशन पर नासा की नई सौर सरणी को फहराते हुए देखें
- पृथ्वी की कक्षा में चालक दल के लिए नया अंतरिक्ष रिकॉर्ड स्थापित किया गया
- नासा के निजी मिशन को अंतरिक्ष स्टेशन पर पहुंचते कैसे देखें
- एयरबस के इस भव्य अंतरिक्ष स्टेशन डिज़ाइन को देखें
- नासा और बोइंग ने पहली क्रू स्टारलाइनर उड़ान की नई तारीख का खुलासा किया
अपनी जीवनशैली को उन्नत करेंडिजिटल ट्रेंड्स पाठकों को सभी नवीनतम समाचारों, मजेदार उत्पाद समीक्षाओं, व्यावहारिक संपादकीय और एक तरह की अनूठी झलक के साथ तकनीक की तेज़ गति वाली दुनिया पर नज़र रखने में मदद करता है।


