Jos haluaisit kulkea pitkän matkan ja sinulla olisi käytössäsi maailman parhaat pikajuoksijat, juoksisitko heidät toisiaan vastaan vai työskenteletkö yhdessä viestissä? Se on pohjimmiltaan ongelma Elliott Rouse, biolääketieteen insinööri ja Neurobionics Labin johtaja Michiganin yliopistossa Ann Arborissa, on kamppaillut parhaiden vuosien ajan.
Sisällys
- Yhteistyön edistäminen
- Tässä tulee bioninen jalka
Rouse, insinööri, on yksi monista, jotka työskentelevät kehittääkseen ohjausjärjestelmän bionisille jaloille, keinotekoiset raajat jotka käyttävät erilaisia käyttäjän signaaleja toimiakseen ja liikkuakseen kuten biologiset raajat.
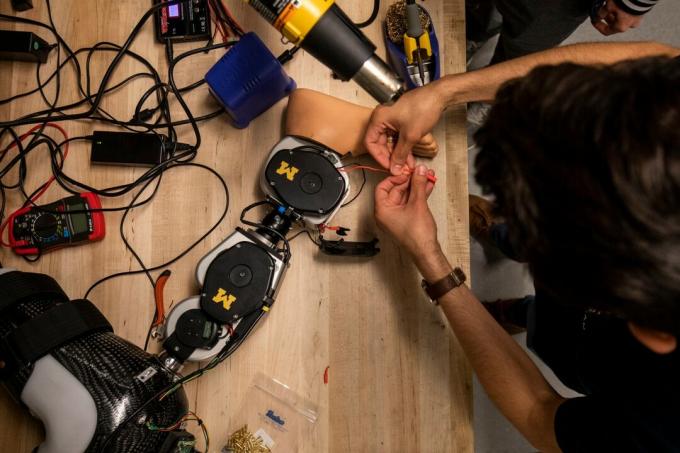
Avoimen lähdekoodin bioninen jalka pyrkii edistämään proteesia nopeasti
"Todennäköisesti suurin haaste robottijalan luomisessa on mukana oleva ohjain, joka kertoo heille, mitä tehdä", Rouse kertoi Digital Trendsille. ”Joka kerta kun käyttäjä ottaa askeleen, askel on aloitettava. Ja kun he vaihtavat, jalan on tiedettävä, että heidän toimintansa on muuttunut, ja liikkua sopeutuakseen tähän erilaiseen toimintaan. Jos se tekee virheen, henkilö voi loukkaantua erittäin, hyvin - esimerkiksi putoamalla portaista. Eri puolilla maailmaa on lahjakkaita ihmisiä, jotka tutkivat näitä kontrollihaasteita. He investoivat vuosia ajastaan ja satoja tuhansia dollareita robottijalan rakentamiseen. Näin asiat ovat olleet tämän alan alusta lähtien."
Liittyvät
- Climeworks haluaa puhdistaa ilmapiirin rakennuksen kokoisilla imureilla
Yhteistyön edistäminen
Vain Rousen mukaan se on rikki. On ymmärrettävää, että kilpailevat korkean teknologian yritykset vaipuvat salassa, kun ne kehittävät Next Bigia Asia, jonka he toivovat myyvän gajillionin yksikköä ja tuovan vielä muutaman sadan miljardin dollarin tai enemmän markkinoilleen korkki. Mutta on vähemmän ymmärrettävää, kun tutkimuslaitokset hukkaavat loistavia mieliä saamalla heidät ratkaisemaan samoja ongelmia, joita myös muut yliopistot ratkaisevat. Helvetti, jopa kerran vannoneet viholliset Apple ja Google työskentelemään yhdessä, kun panokset ovat riittävän korkeat.
Suositellut videot
"Akateeminen järjestelmä ei ole kovin hyvä edistämään tutkimusyhteistyötä", Rouse myönsi. "Professorina minulla on tehtävänä työ, jossa minua mitataan tietyissä asioissa, kuten liittovaltion rahoituksessa, julkaistuissa apurahoissa ja mentoroimissani opiskelijoissa. Jos tarkastellaan tapaa, jolla akateeminen järjestelmä muodostaa vertailukohdan tutkimuslaboratorioiden tiedekunnalle, yhteistyö on [oikeastaan tavallaan] vähätelty."
Kun kyse on bionisten raajojen ohjausjärjestelmistä, ongelmana on, että jotta voidaan edes aloittaa ohjausjärjestelmiä kehittävien yksittäisten tutkimuslaboratorioiden eri puolilla maailmaa on ensin rakennettava tausta laitteisto. Palatakseni aikaisempaan analogiaan, se on pahempaa kuin esimerkiksi Applen ja Samsungin kilpailevien älypuhelimien huippusalainen kehittäminen; se olisi enemmän kuin Applen ja Samsungin olisi rakennettava omat käyttöjärjestelmänsä tyhjästä ennen kuin alkaisivat suunnitella uutta sukupolveaan älypuhelin.
Tässä on Rousen projekti Avoimen lähdekoodin jalka, tulee peliin. Kuten sen taustalla olevat tutkijat selittävät omistetulla verkkosivulla: "Tämän projektin päätarkoitus on yhdistää a Hajanaista kenttätutkimusta proteettisten laitteistojen suunnittelussa, proteesin ohjauksessa ja amputoinnin biomekaniikassa tehdään tällä hetkellä siilot. Jokainen tutkija kehittää oman robottijalkajärjestelmän, jolla testataan ohjausstrategioitaan tai biomekaanisia hypoteesejaan. Tämä voi onnistua lyhyellä aikavälillä, koska jokainen tutkija tuottaa julkaisuja ja edistää tietoa. Pitkällä aikavälillä tämä hajanainen tutkimus lähestymistapa kuitenkin estää tuloksia vaikuttamasta ihmisten elämään vammaiset henkilöt – huipentuu alan kattavaan epäonnistumiseen, joka todella ei pysty vaikuttamaan siihen motivoi sitä."
Tässä tulee bioninen jalka
Avoimen lähdekoodin jalka on nimensä mukaisesti avoimen lähdekoodin bioninen jalka, josta voisi tulla kaikkialla läsnä oleva laitteistojärjestelmä, joka helpottaa kasvua proteesien hallinnan alueella. Suunnittelu on yksinkertainen (eli helposti koottava), kannettava (kevyt ja saa virtansa sisäisistä akuista), taloudellinen (se maksaa 10 000–25 000 dollaria verrattuna kaupallisesti saatavilla oleviin yli 100 000 dollarin sähköisiin proteeseihin), skaalautuva ja muokattavissa. Yksityiskohtaiset ohjeet ovat saatavilla verkossa seurattavaksi, ja Rouse ja hänen kollegansa jopa rakentavat ne ja lähettävät ne tutkijoille, jos sellaisen luominen itse ei ole mahdollista.

Prosessissa hankkeella pyritään saavuttamaan kolme tavoitetta. Ensimmäinen niistä on tunnistaa sähkömekaaninen rakenne, jota voidaan käyttää edullisissa, tehokkaissa, avoimen lähdekoodin robottipolvi- ja nilkkajärjestelmissä. Toiseksi ymmärtää, kuinka erillisiä proteesinhallintastrategioita voidaan yhdistää amputoidun kävelyn hyödyksi. Lopuksi Open-Source Leg -projekti haluaa validoida ehdotetun avoimen lähdekoodin järjestelmänsä työkaluksi proteesien hallinnan tutkimukseen. Jos nämä tutkimustavoitteet voidaan saavuttaa, se voi osoittautua pelin muuttajaksi, jonka tekijät toivovat sen olevan.
"Elämäni aikana tulemme näkemään bioniset raajat, jotka voivat käyttää hermoinformaatiota, joko aivokuoren tai perifeerisen hermon tasolla, kertomaan meille karkeasta liikkeestä", Rouse sanoi. "Se antaa meille hallinnan ilman, että tarvitsemme sisäisiä antureita." Tämä vallankumous, hän sanoi, on jo tapahtumassa. Vaikka hienojakoinen näppärä liike voi kestää tätä kauemmin, se ei välttämättä ole sci-fi-unelma, joka on monien elämien päässä toteutumisesta.
Ja jos ihmiset keksivät, kuinka työskennellä yhdessä, se voisi olla täällä paljon nopeammin.
Toimittajien suositukset
- Kuinka 3D-tulostus on muuttanut proteettisten raajojen maailmaa ikuisesti



