Engang lidt mere end en Hollywood-agtig drøm, blev selvkørende biler en realitet i 2010'erne, hovedsagelig takket være forskning udført af teknologivirksomheder som Google. Selvom de ikke er smeltet sammen i mainstream endnu, og du ikke kan købe en i skrivende stund, logger selvkørende prototyper millioner af miles på vores lands veje årligt.
Indhold
- Den førerløse drøm begynder
- John McCarthys robo-chauffør
- Ingen hænder på tværs af Amerika
- Den store udfordring er for udfordrende
- Parkering bliver smartere
- Google søger efter et svar
- De store bilproducenter dykker ind
- Det første dødsfald i en selvkørende bil
- A.I. kommer til selvkørende biler
- Hvad er det næste?
- Autonominiveauer forklaret
At komprimere historien om selvkørende biler til færre end 10 milepæle er ikke let, men vi har gjort vores bedste.
Anbefalede videoer
Den førerløse drøm begynder
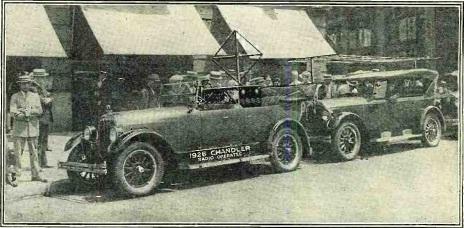
Det tog ikke lang tid efter fødslen af bilen for opfindere at begynde at tænke på autonome køretøjer. I 1925 opfinder Francis Houdina demonstreret
en radiostyret bil, som han kørte gennem gaderne på Manhattan uden nogen ved rattet. Ifølge en perioderapport fra New York Times var det radiostyrede køretøj i stand til at starte sin motor, skifte gear og afgive hornet "som om en fantomhånd var ved rattet."Som en underholdende sidebemærkning lød Houdinas navn tilstrækkeligt som den berømte flugtkunstner og illusionist Harry Houdinis navn, til at mange mennesker troede, at dette var Houdinis seneste trick. Houdini besøgte Houdina Company og kom i et fysisk skænderi, hvor han knuste en elektrisk lysekrone.
John McCarthys robo-chauffør
I 1969, John McCarthy - der er fejret som en af grundlæggerne af kunstig intelligens - beskrev noget, der ligner det moderne autonome køretøj i et essay med titlen "Computerstyrede biler." McCarthy henviste til en "automatisk chauffør", der er i stand til at navigere på offentlig vej via en "fjernsynskameraindgang, der bruger det samme visuelle input, som er tilgængeligt for den menneskelige chauffør."
Han skrev, at brugere skulle kunne indtaste en destination ved hjælp af et tastatur, som så ville få bilen til straks at køre dem dertil. Yderligere kommandoer vil give brugerne mulighed for at ændre destinationen, stoppe ved et toilet eller en restaurant, sætte farten ned eller sætte farten op i tilfælde af en nødsituation. Intet sådant køretøj blev bygget, men McCarthys essay opstillede missionen for andre forskere at arbejde hen imod.
Ingen hænder på tværs af Amerika
Neural netværksbaseret autonom kørsel
I begyndelsen af 1990'erne forsker Carnegie Mellon Dean Pomerleau skrev en Ph.D. afhandling, der beskriver hvordan neurale netværk kunne tillade et selvkørende køretøj at tage rå billeder fra vejen og udsende styrestyring i realtid. Pomerleau var ikke den eneste forsker, der arbejdede på selvkørende biler, men hans brug af neurale net viste sig godt. mere effektive end alternative forsøg på manuelt at opdele billeder i "vej" og "ikke-vej" kategorier.
I 1995 tog Pomerleau og medforsker Todd Jochem deres Navlab selvkørende bilsystem på vejen. Deres autonome minivan med bare knogler (de skulle kontrollere hastighed og bremsning) rejste 2.797 miles kyst-til-kyst fra Pittsburgh til San Diego på en rejse, som parret kaldte "No Hands Across America."
Den store udfordring er for udfordrende
DARPA annoncerede sin første Grand Challenge i 2002. Det tilbød videnskabsmænd fra topforskningsinstitutioner en pris på 1 million dollars, hvis de kunne bygge et autonomt køretøj, der kunne navigere en 142-mils bane gennem Mojave-ørkenen.
Udfordringen blev afholdt i 2004. Ingen af de 15 deltagere var i stand til at gennemføre kurset. Den "vindende" post dækkede mindre end 8 miles på flere timer, før den brød i brand. Det var et ødelæggende slag mod målet om at bygge rigtige selvkørende biler; efter nyheder om branden skabte overskrifter, antog mange, at fuld autonomi var umulig at nå.
Parkering bliver smartere
Audi Piloted Parking (Audis selvparkerende bil)
Mens autonome køretøjer stadig lignede science fiction i 2000'erne, begyndte selvparkeringssystemer at dukke op enten som standard- eller ekstraudstyr (og for det meste på luksusbiler). De demonstrerede, at sensorer var tæt på at kunne håndtere relativt udfordrende forhold i den virkelige verden, såsom parallel parkering på trange pladser.
Toyotas hybrid Prius tilbød automatisk parallelparkeringshjælp i 2003, mens Lexus snart tilføjede et lignende system til LS, dens flagskib sedan. Ford lancerede Active Park Assist i 2009, og BMW fulgte efter et år senere.
Google søger efter et svar

Google lancerede i al hemmelighed sit Self-Driving Car Project i 2009. Kendt som Waymo i 2020, blev det oprindeligt ledet af Sebastian Thrun, den tidligere direktør for Stanford Artificial Intelligence Laboratory og medopfinderen af Google Street View. Det tog et par år for virksomheden at annoncere, at deres prototyper tilsammen havde kørt 300.000 miles under computerkontrol uden en eneste ulykke, en imponerende bedrift, der overraskede mange.
I 2014 afslørede den en autonom prototype uden et rat, en gaspedal eller en bremsepedal; den var 100 % selvstændig. Waymo hyldes bredt som den ubestridte leder i selvkørende teknologi.
De store bilproducenter dykker ind

I 2013 var bilselskaber, herunder General Motors, Ford, Mercedes-Benz og BMW arbejdede på deres egne selvkørende teknologier. Ægte autonomi viste sig at være sværere at opnå end mange antog, både fra et teknisk og et juridisk synspunkt, og den teknologi, der var tilgængelig for forbrugerne i 2010'erne, var i bedste fald delvist automatiseret.
Det første dødsfald i en selvkørende bil

Påstande om, at selvkørende teknologi er sikrere end menneskelige bilister, blev sat i tvivl, da en af Ubers Volvo XC90-baserede prototyper ramte og dræbte den 49-årige Elaine Herzberg da hun krydsede en gade i Arizona. Skønt hun gik på tur, blev ulykken anset for at være helt undgåelig. Politibetjente konkluderede, at Ubers sikkerhedschauffør (som formodes at tage over i tilfælde af en nødsituation) så på Hulu indtil et halvt sekund før sammenstødet.
A.I. kommer til selvkørende biler

På CES 2018, afslørede Nvidia en ny selvkørende bilchip, kaldet Xavier, der inkorporerer kunstig intelligens. Virksomheden meddelte derefter, at det var samarbejde med Volkswagen at udvikle A.I. til fremtidens selvkørende biler. Selvom det ikke er den første indsats for at præge autonome biler med A.I. (Toyota undersøgte allerede konceptet med MIT og Stanford), er Volkswagen-Nvidia-samarbejdet det første, der forbinder A.I. til produktionsklar hardware. Det åbner mulighed for, at selvkørende biler kan præstere bedre, samt for nye bekvemmelighedsfunktioner som digitale assistenter.
Hvad er det næste?
I 2020 har de fleste bilproducenter nedkølet deres selvkørende bilambitioner og taget en langt mere realistisk tilgang til udviklingen af teknologien. Der er ikke en eneste autonom bil, som medlemmer af den brede offentlighed kan købe, men nogle firmaer tror, de er tæt på at knække koden. Milliarder af dollars og et misundelsesværdigt monopol er på spil.
Tesla sælger en option-pakke ved navn Full Self-Driving, men dens biler er ikke autonome på nogen måde; den tyske regering bad især den om at holde op med at bruge dette udtryk. Volkswagen er udvikle teknologien internt, og det lovede at implementere retro autonome varebiler under VM i 2022. Og den tyske leverandør Bosch gik sammen med Mercedes-Benz moderselskab Daimler for at sætte autonome S-Klasse-baserede prototyper på gaderne i San Jose. Andre partnerskaber, projekter, succeser og fiaskoer vil utvivlsomt dukke op i begyndelsen af 2020'erne.
Autonominiveauer forklaret
Mens begreberne "selvkørende" og "autonom" bliver kastet rundt på en masse, er det ikke alle køretøjer, der har de samme muligheder. Det SAE autonomi skala bruges til at bestemme forskellige niveauer af autonom kapacitet. Her er en opdeling.
Niveau 0: Ingen automatisering. Føreren kontrollerer styretøjet og hastigheden (både acceleration og deceleration) til enhver tid uden hjælp overhovedet. Dette omfatter systemer, der kun giver advarsler til føreren uden at foretage sig noget.
Niveau 1: Begrænset førerhjælp. Dette omfatter systemer, der kan styre styring og acceleration/deceleration under specifikke omstændigheder, men ikke begge dele på samme tid.
Niveau 2: Førerassistentsystemer, der styrer både styring og acceleration/deceleration. Disse systemer flytter noget af arbejdsbyrden væk fra den menneskelige chauffør, men kræver stadig, at denne person altid er opmærksom.
Niveau 3: Køretøjer, der kan køre sig selv i visse situationer, såsom i tæt trafik på opdelte motorveje. Menneskelig indgriben er ikke nødvendig, når den autonome tilstand er aktiveret, men føreren skal være klar til at tage over, når køretøjet støder på en situation, der overskrider dens grænser.
Niveau 4: Køretøjer, der kan køre selv det meste af tiden, men som kan have brug for en menneskelig chauffør til at tage over i visse situationer.
Niveau 5: Fuldstændig selvstændig. Køretøjer på niveau 5 kan køre selv til enhver tid, under alle omstændigheder. De har ikke behov for manuelle kontroller.
Redaktørens anbefalinger
- Volkswagen lancerer sit eget selvkørende biltestprogram i USA.
- Autonome biler forvirret af San Franciscos tåge
- Lyser din check engine-lampe? Her er 10 mulige årsager
- De bedste iPhone-bilholdere i 2023: top 10 af de bedste, du kan købe
- Teslas brugtbilsmarked er ikke længere så lukrativt, viser data



