Hvis du ville tilbagelægge en stor distance og havde verdens bedste sprintere til din rådighed, ville du så have dem til at løbe mod hinanden eller arbejde sammen i en stafet? Det er i bund og grund problemet Elliott Rouse, en biomedicinsk ingeniør og direktør for Neurobionics Lab ved University of Michigan, Ann Arbor, har kæmpet med i de bedste år.
Indhold
- Fremme samarbejde
- Her kommer det bioniske ben
Rouse, en ingeniør, er en af mange, der arbejder på at udvikle et kontrolsystem til bioniske ben, kunstige lemmer der bruger forskellige signaler fra bæreren til at agere og bevæge sig som biologiske lemmer.
Open source bioniske ben sigter mod hurtigt at fremme proteser
"Den største udfordring ved at skabe et robotben er sandsynligvis den involverede controller, der fortæller dem, hvad de skal gøre," sagde Rouse til Digital Trends. "Hver gang bæreren tager et skridt, skal der tages et skridt. Og når de skifter, skal benet vide, at deres aktivitet har ændret sig og bevæge sig for at imødekomme den anderledes aktivitet. Hvis det laver en fejl, kan personen blive meget, meget såret - måske falde ned ad nogle trapper, for eksempel. Der er talentfulde mennesker rundt om i verden, der studerer disse kontroludfordringer. De investerer årevis af deres tid og hundredtusindvis af dollars i at bygge et robotben. Det er sådan, tingene har været, siden dette felt startede."
Relaterede
- Climeworks ønsker at rense atmosfæren med en flåde af støvsugere i bygningsstørrelse
Fremme samarbejde
Kun ifølge Rouse er det et ødelagt system. Det er forståeligt, at konkurrerende højteknologiske virksomheder viger i hemmelighed, når de udvikler Next Big Ting, de håber vil sælge en gajillion enheder og tilføje yderligere et par hundrede milliarder dollars eller mere til deres marked kasket. Men det er mindre forståeligt, når forskningsinstitutter spilder geniale sind ved at få dem til at løse de samme problemer, som andre universiteter også løser. For pokker, selv engang svorne fjender Apple og Google arbejde sammen, når indsatsen er høj nok.
Anbefalede videoer
"Det akademiske system er ikke super godt til at fremme forskningssamarbejde," indrømmede Rouse. "Som professor har jeg et job at udføre, hvor jeg bliver målt på visse ting som føderal finansiering, stipendier, der offentliggøres, og studerende, som jeg vejleder. Hvis man ser på den måde, hvorpå det akademiske system etablerer benchmark for fakultetet i forskningslaboratorier, er samarbejde [faktisk på en måde] de-betonet."
Når det kommer til kontrolsystemer til bioniske lemmer, er problemet, at for overhovedet at kunne starte ved at udvikle kontrolsystemer, skal individuelle forskningslaboratorier rundt om i verden først bygge det underliggende hardware. For at vende tilbage til den tidligere analogi, så er det værre end for eksempel, at Apple og Samsung udvikler konkurrerende smartphones i tophemmeligt; det ville være mere som at Apple og Samsung skulle bygge deres egne computeroperativsystemer fra bunden, før de begynder at designe deres næste generation smartphone.
Det er her Rouses projekt, den Open Source ben, kommer i spil. Som forskerne bag forklarer på en dedikeret webside: "Det overordnede formål med dette projekt er at forene en fragmenteret felt[R]forskning inden for protetisk hardwaredesign, protesekontrol og amputerede biomekanik udføres i øjeblikket i siloer. Hver forsker udvikler deres eget robotbensystem, hvorpå de kan teste deres kontrolstrategier eller biomekaniske hypoteser. Dette kan være en succes på kort sigt, da hver enkelt forsker producerer publikationer og fremmer viden. Men på lang sigt forhindrer denne fragmenterede forskningstilgang resultater i at påvirke livet for personer med handicap - kulminerende i en overordnet fejl på området for virkelig at have den effekt, at motiverede det."
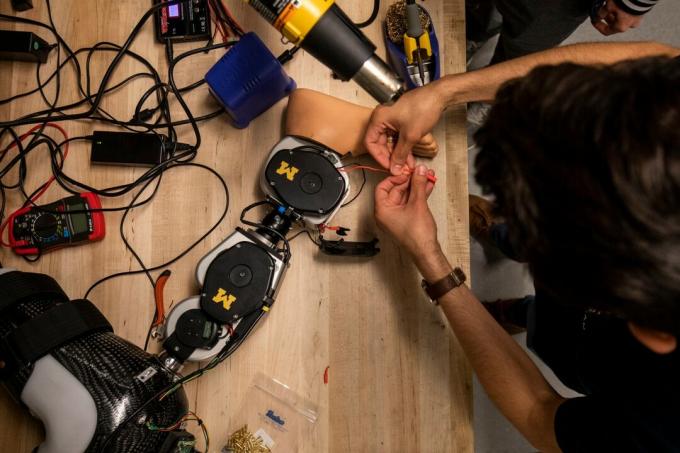
Her kommer det bioniske ben
Open-Source Ben er, som navnet antyder, et open source bionisk ben, der kunne blive det allestedsnærværende hardwaresystem til at lette vækst inden for protesekontrol. Designet er enkelt (det betyder let at samle), bærbart (let og drevet af indbyggede batterier), økonomisk (det koster mellem $10.000 og $25.000 sammenlignet med $100.000 plus kommercielt tilgængelige drevne proteser), skalerbare og kan tilpasses. Detaljerede instruktioner er tilgængelige online for at følge, og Rouse og hans kolleger vil endda bygge dem og sende dem ud til forskere, når det ikke er muligt at lave en selv.

I processen søger projektet at nå tre mål. Den første af disse er at identificere et elektromekanisk design, der kan bruges til lave omkostninger, højtydende, open source robotknæ- og ankelsystemer. For det andet at forstå, hvordan separate protesekontrolstrategier kan kombineres for at gavne amputeret gang. Endelig ønsker Open-Source Leg-projektet at validere sit foreslåede open source-system som et værktøj til forskning i protesekontrol. Hvis disse forskningsmål kan nås, kan det vise sig at være den game-changer, som dens skabere håber, det bliver.
"I min levetid skal vi se bioniske lemmer, der kan bruge neural information, enten på det kortikale eller perifere nerveniveau, for at fortælle os grov bevægelse,” sagde Rouse. "Det vil give os kontrol uden behov for indbyggede sensorer." Denne revolution, sagde han, sker allerede. Selvom finkornet fingerfærdig bevægelse kan tage længere tid end dette, er det ikke nødvendigvis en sci-fi-drøm, der er mange livstider væk fra at ske.
Og hvis folk kan finde ud af at arbejde sammen, kunne det være her meget hurtigere.
Redaktørens anbefalinger
- Hvordan 3D-print har ændret verden af lemmerproteser for altid



