إذا كنت تريد قطع مسافة كبيرة وكان تحت تصرفك أفضل العدائين في العالم، فهل ستجعلهم يركضون ضد بعضهم البعض أو يعملون معًا في سباق التتابع؟ وهذه هي المشكلة في جوهرها إليوت روس، مهندس الطب الحيوي ومدير مختبر Neurobionics في جامعة ميشيغان، آن أربور، كان يتصارع منذ عدة سنوات.
محتويات
- تعزيز التعاون
- هنا تأتي الساق الإلكترونية
روس، مهندس، هو واحد من كثيرين يعملون على تطوير نظام تحكم للأرجل الإلكترونية، أطراف صناعية التي تستخدم إشارات مختلفة من مرتديها للتصرف والتحرك مثل الأطراف البيولوجية.
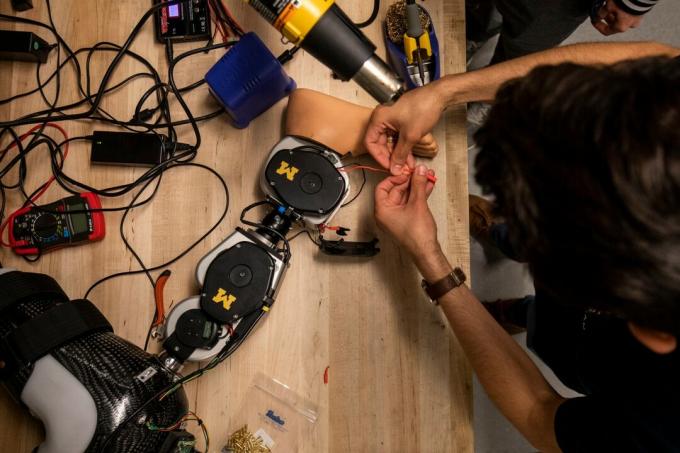
تهدف الساق الإلكترونية مفتوحة المصدر إلى تطوير الأطراف الاصطناعية بسرعة
وقال روس لـ Digital Trends: "ربما يكون التحدي الأكبر أمام إنشاء ساق روبوتية هو وحدة التحكم المعنية، والتي تخبرهم بما يجب عليهم فعله". "في كل مرة يتخذ فيها مرتديها خطوة، يجب أن يبدأ خطوة. وعندما يقومون بالتبديل، تحتاج الساق إلى معرفة أن نشاطهم قد تغير وأن يتحركوا لاستيعاب هذا النشاط المختلف. إذا ارتكب خطأ، يمكن أن يصاب الشخص بجروح بالغة جدًا - ربما يسقط على بعض السلالم، على سبيل المثال. هناك أشخاص موهوبون حول العالم يدرسون تحديات التحكم هذه. إنهم يستثمرون سنوات من وقتهم ومئات الآلاف من الدولارات في بناء ساق آلية. هذه هي الطريقة التي كانت عليها الأمور منذ أن بدأ هذا المجال.
متعلق ب
- تريد شركة Climeworks تنظيف الجو بأسطول من المكانس الكهربائية بحجم المبنى
تعزيز التعاون
ولكن، وفقًا لروس، يعد هذا نظامًا مكسورًا. من المفهوم أن شركات التكنولوجيا الفائقة المتنافسة تلجأ إلى السرية عندما تقوم بتطوير شركة Next Big الشيء الذي يأملون فيه هو بيع عدد كبير من الوحدات وإضافة بضع مئات من مليارات الدولارات أو أكثر إلى سوقهم قبعة. لكن الأمر يكون أقل قابلية للفهم عندما تهدر معاهد الأبحاث العقول اللامعة من خلال حملهم على حل نفس المشكلات التي تحلها الجامعات الأخرى أيضًا. تبا، حتى الأعداء اللدودين أبل وجوجل العمل معًا عندما تكون المخاطر عالية بما فيه الكفاية.
مقاطع الفيديو الموصى بها
واعترف روس قائلاً: "إن النظام الأكاديمي ليس جيدًا جدًا في تعزيز البحث التعاوني". "بصفتي أستاذًا، لدي عمل يجب أن أقوم به حيث يتم قياسي وفقًا لأشياء معينة مثل التمويل الفيدرالي، والمنح المنشورة، والطلاب الذين أقوم بإرشادهم. إذا نظرت إلى الطريقة التي يحدد بها النظام الأكاديمي المعيار لأعضاء هيئة التدريس في مختبرات الأبحاث، فستجد أن التعاون [في الواقع] غير مؤكد".
عندما يتعلق الأمر بأنظمة التحكم في الأطراف الإلكترونية، تكمن المشكلة في القدرة على البدء عند تطوير أنظمة التحكم، يجب على مختبرات الأبحاث الفردية حول العالم أولاً بناء الأساس المعدات. وبالعودة إلى التشبيه السابق، فإن هذا أسوأ من قيام شركتي أبل وسامسونج، على سبيل المثال، بتطوير هواتف ذكية منافسة في سرية تامة؛ سيكون الأمر أشبه باضطرار Apple وSamsung إلى بناء أنظمة تشغيل الكمبيوتر الخاصة بهما من الصفر قبل البدء في تصميم الجيل التالي هاتف ذكي.
هذا هو المكان الذي مشروع روس، ساق مفتوحة المصدر، يأتي دور. وكما يشرح الباحثون الذين يقفون وراءه على صفحة ويب مخصصة: "إن الهدف الشامل لهذا المشروع هو توحيد يتم حاليًا إجراء أبحاث ميدانية مجزأة في تصميم الأجهزة التعويضية، والتحكم في الأطراف الاصطناعية، والميكانيكا الحيوية لمبتوري الأطراف في صوامع. يقوم كل باحث بتطوير نظام الساق الروبوتية الخاص به لاختبار استراتيجيات التحكم أو فرضيات الميكانيكا الحيوية الخاصة به. قد يكون هذا ناجحًا على المدى القصير نظرًا لأن كل باحث ينتج منشورات ويعزز المعرفة. ومع ذلك، على المدى الطويل، فإن هذا النهج البحثي المجزأ يعيق النتائج من التأثير على حياة الناس الأفراد ذوي الإعاقة - وبلغت ذروتها في الفشل الشامل للمجال في إحداث التأثير الحقيقي لذلك حفزت ذلك."
هنا تأتي الساق الإلكترونية
إن الساق مفتوحة المصدر، كما يوحي اسمها، هي ساق إلكترونية مفتوحة المصدر يمكن أن تصبح نظام أجهزة واسع الانتشار لتسهيل النمو في مجال التحكم في الأطراف الاصطناعية. التصميم بسيط (يعني سهولة تجميعه)، ومحمول (خفيف الوزن ويعمل بالبطاريات المدمجة)، واقتصادي (مكلف). ما بين 10.000 إلى 25.000 دولار، مقارنة بالأطراف الصناعية التي تعمل بالطاقة والمتوفرة تجاريًا والتي تبلغ قيمتها أكثر من 100.000 دولار)، وقابلة للتطوير و قابل للتخصيص. تتوفر تعليمات تفصيلية على الإنترنت يمكن اتباعها، وسيعمل روس وزملاؤه على بنائها وشحنها إلى الباحثين عندما يكون إنشاء واحدة بأنفسهم غير ممكن.

وفي هذه العملية، يسعى المشروع إلى تحقيق ثلاثة أهداف. أولها هو تحديد التصميم الكهروميكانيكي الذي يمكن استخدامه لأنظمة الركبة والكاحل الروبوتية منخفضة التكلفة وعالية الأداء ومفتوحة المصدر. ثانيًا، فهم كيف يمكن الجمع بين استراتيجيات التحكم المنفصلة في الأطراف الاصطناعية من أجل الاستفادة من مشية مبتوري الأطراف. أخيرًا، يريد مشروع Open-Source Leg التحقق من صحة نظامه مفتوح المصدر المقترح كأداة للبحث في التحكم في الأطراف الاصطناعية. إذا أمكن تحقيق هذه الأهداف البحثية، فمن الممكن أن يكون هذا هو التغيير الذي يأمل منشئوه أن يحدثه.
"في حياتي، سوف نرى أطراف إلكترونية يمكنها استخدام المعلومات العصبيةقال روس، سواء على مستوى العصب القشري أو المحيطي، ليخبرنا بالحركة الإجمالية. "وهذا سيمنحنا السيطرة دون الحاجة إلى أجهزة استشعار على متن الطائرة." وقال إن هذه الثورة تحدث بالفعل. في حين أن الحركة الدقيقة والدقيقة يمكن أن تستغرق وقتًا أطول من هذا، إلا أنها ليست بالضرورة حلمًا من الخيال العلمي بعيد المنال لسنوات عديدة.
وإذا تمكن الناس من معرفة كيفية العمل معًا، فقد يكون الأمر هنا أسرع كثيرًا.
توصيات المحررين
- كيف غيرت الطباعة ثلاثية الأبعاد عالم الأطراف الصناعية إلى الأبد؟



